Heim
>
Produkte > Laser-Entfernungsmesser-Modul > 905-nm-Laser-Entfernungsmesser-Modul > 1200 m Mikrolaser -Entfernungsmodul (LRF)
Produkte
- Laser-Entfernungsmesser-Modul
- Laser
- Faseroptik-Kreisel
- MWIR-Kamera
- Laser-Gyroskop
- Wärmebildtechnik
- Laser-Entfernungsmesser-Fernglas
- Kamera
- SWIR-Kameras
- గోడేరే డబుల్-లేయర్ శాడిల్ బ్యాగ్, ఈ అసలైన లెదర్ మహిళల క్రాస్బాడీ బ్యాగ్, ఎటర్నల్ క్లాసిక్, పర్ఫెక్ట్గా బ్లెండింగ్ స్టైల్ మరియు ఫంక్షనాలిటీ. అధునాతనతను వెదజల్లే ఎరుపు రంగు లెదర్ క్రాస్బాడీ బ్యాగ్ని కోరుకునే ఫ్యాషన్-ఫార్వర్డ్ మహిళలకు ఇది సరైన ఎంపిక. ఈ లెదర్ వాలెట్ విశాలమైన ఇంటీరియర్ స్పేస్ మరియు స్టైలిష్ డిజైన్ను కలిగి ఉంది, ఇది అధిక-నాణ్యత గల మహిళల తోలు హ్యాండ్బ్యాగ్లను మెచ్చుకునే వారికి తప్పనిసరిగా ఉండాలి. డబుల్ లేయర్ జీను బ్యాగ్
- AESA-Radar
- Elektronischer Kompass
- Laserverteidigung
- Drahtlose Videoübertragungsverbindung




")
1200 m Mikrolaser -Entfernungsmodul (LRF)
Das STA-D09A Miniatur-Laser-Rangierungsmodul verwendet einen 905-nm-Halbleiterlaser, der die Eigenschaften von großer Reichweite, geringem Stromverbrauch, geringer Größe und Augensicherheit aufweist. Es eignet sich sehr für die Integration kleiner unbemannter Luftfahrzeugkapseln, Handheld -Nachtsichtgeräte, thermischer Bildgebung und anderer Geräte.
Maximaler Bereich: 1200 m
Ranggenauigkeit: ± 1 m
Rangfrequenz: Einschuss-Rangliste, 1 Hz, 2Hz
Gewicht: 10g ± 0,5 g
Anfrage absenden
Produktbeschreibung
Schlüsselmerkmale
Halbleiterlasertechnologie: Überlegene Zuverlässigkeit, Kompaktheit und geringere Stromverbrauch als herkömmliche Flugzeitenfinders und ermöglichen die Integration in tragbare und platzbeschränkte Geräte.
Produktleistungsindex
| Seriennummer | Projektname | Sta-d09a |
| 1 | Menschliche Augensicherheit | Ja |
| 2 | Laserwellenlänge | 905nm |
| 3 | Laserdivergenzwinkel | 1 × 6mrad |
| 4 | Empfangsfeld des Sichtfelds | ~ 20mrad |
| 5 | Senderkaliber | Φ10 × 7,5 mm |
| 6 | Kaliber erhalten | Φ15 × 10 mm |
| 7 | Reichweite | 5 ~ 1200 m |
| 8 | Ranggenauigkeit | ± 1 m |
| 9 | Messfrequenz | Einzelschüsse, 1 Hz, 2Hz |
| 10 | Genauigkeitsrate | ≥ 98% |
| 11 | Falsche Alarmrate | ≤ 1% |
| 12 | Datenschnittstelle | UART (TTL_3.3V) |
| 13 | Versorgungsspannung | DC 3 ~ 5 in |
| 14 | Stromverbrauch | Standby: ≤ 0,6W@3.3V; Arbeit: ≤ 1W@3.3V; |
| 15 | ||
| 16 | Gewichte | 10 ± 0,5 g |
| 17 | Größe (L × W × H) | ≤ 26 × 25 × 13,5 mm |
| 18 | Betriebstemperatur | -20 ~ + 60 ℃ |
| 19 | Lagertemperatur | -30 ~ + 60 ℃ |
| 20 | Schock | 1200g, 1 ms |
| 21 | Vibration | 5 ~ 50 ~ 5Hz, 1 Oktave/min, 2,5 g |
| 22 | Zuverlässigkeit | MTBF ≥ 1500H |
| 23 | Startzeit | ≤200 ms; |
| 24 | Elektrische Schnittstelle | Sockel: 0,8 WTB-6AB-01 Stecker: 0,8 WTB-6Y-2 |
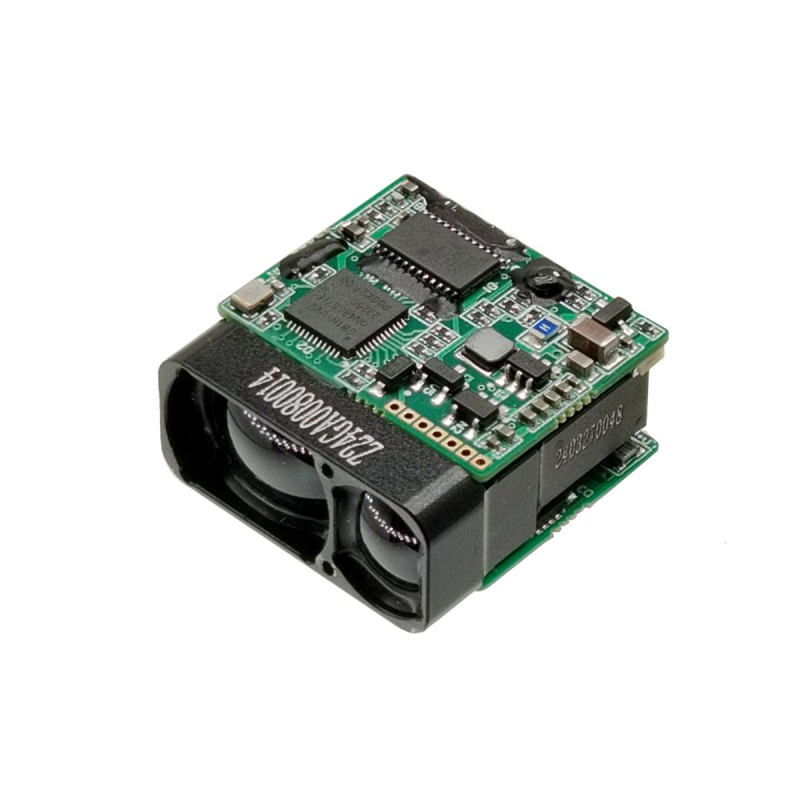
Modulzusammensetzung
Die Hauptkomponenten des Laser -Rangefinder -Produkts sind wie folgt:
a) Empfangen und Übertragen von Komponenten;
B) Schaltkomponenten; 26 mm × 25 mm × 13,5 mm (L × W × h), das Gewicht beträgt ≤ 10 g ± 0,5 g und sein Aussehen ist in Abb.1 dargestellt.

Abbildung 1 Produktaussehen
Strukturinstallationsschnittstelle
Die externen Abmessungen der mechanischen und optischen Schnittstellen sind in Abbildung 2 dargestellt.

Figure 2 Mechanical and optical interface diagram
Elektrische Schnittstelle
Die Anforderungen an die elektrische Schnittstelle sind wie folgt:
a) Stromversorgungsspannung:3 V ~ 5,5 V (typischer Wert 3,3 V oder 5 V);
b) Standby -Stromverbrauch:≤ 0,8 W;
c) Durchschnittlicher Stromverbrauch:≤ 1W;
D) Das obere Computerende erreicht Vernetzungstests mit dem Abstandsmessmaschinenende 0,8 WTB-6AB-01-Anschluss (Yueqing Huabao) über den 0,8WTB-6yy-2-Anschluss. Die Definitionen der Netzteil- und Kommunikationsanschlussnins am Rangelfinderende sind in Tabelle 1 dargestellt, und die Stecker -Pin -Positionen sind in Abbildung 3 dargestellt.
Tabelle 2 Definition des Produktstifts für Produkte
| Stift | Beschriftung | Elektrische Eigenschaften Definition | Signalrichtung |
| 1 | Macht-eins |
|
|
| 2 | Ttl_rxd | Signaleingangsanschluss | Hostcomputer zum Entfernungsmesser |
| 3 | Ttl_txd | Signalausgangsanschluss | Rangefinder zum Hostcomputer |
| 4 | NC |
|
|
| 5 | Stromversorgung+ |
|
|
| 6 | GND |
|
|

Elektrisches Verbindungsdiagramm

Modulkommunikation
Daten
♦ Baud Rate: 115200bit / s;
♦ Einzelbyte -Übertragungsformat: Einschließlich 1 Startbit, 8 Datenbits, kein Scheck, 1 Stoppbit, 8 -Bit -Daten werden zuerst in niedrigem und dann in hohem übertragen.
Protokoll
Single -Ranging -Befehl
Hinweis: Senden Sie den Verifizierungscode = Byte 3 + Byte 4 + Byte 5 + Byte 6 + Byte 7;
Empfindungscode = BYTE 1 + BYTE 2 + BYTE 3 + BYTE 4 + BYTE 5 + BYTE 6 + BYTE 7.
Senden Sie an das Rangmodul
| Byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Beschreibung | 0x55 | 0! | 0x88 | 0xff | 0xff | 0xff | 0xff | Code überprüfen |
Das Sendungsmodul kehrt zurück
| Byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Beschreibung | 0x55 | 0! | Freq | Status | 0xff | Daten_H | Daten_L | Code überprüfen |
Status = 0, kontinuierliche Messung schlägt fehl; Data_h = 0xff, data_l = 0xff; Status = 1, kontinuierliche Messung ist erfolgreich; Data_h = hohes Byte des Messergebnisses; Data_L = niedriges Byte des Messergebnisses.
Freq = 0x89, 1 Hz für die Rangliste; Freq = 0xa9, 2Hz für die Rangliste; Freq = 0xb9, 5Hz für die Rangliste; FREQ = 0xF9 für den Achsenkalibrierungsmodus (der Achsenstatus wird nach dem Empfangen der Achsenkalibrierungsanweisung zurückgesandt).
Aufhören zu messen
Senden Sie an Ranging -Modul:
| Byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Beschreibung | 0x55 | 0! | 0x8e | 0xff | 0xff | 0xff | 0xff | Code überprüfen |
Das Rangmodul kehrt zurück:
| Byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Beschreibung | 0x55 | 0! | 0x8e | Status | 0xff | 0xff | 0xff | Code überprüfen |
Status = 0, die kontinuierliche Messung ist nicht geschlossen; Status = 1, die kontinuierliche Messung ist erfolgreich, um geschlossen zu werden.
Notiz:Die Daten werden hexadezimal zurückgegeben, und alle Datenergebnisse werden ausgegeben, indem die realen Daten mit 10 multipliziert werden.
Beispiel:DIST = 2000,3M, die Ausgabedaten sind 20003, was in hexadezimal als 4e23 konvertiert wird, dh data1 = 0x4e und data2 = 0x23.
Hot-Tags: 1200 m Mikrolaser -Entfernungsmodul (LRF), Hersteller, Lieferanten, Fabrik, China, in China hergestellt, maßgeschneidert, hohe Qualität
Verwandte Kategorie
905-nm-Laser-Entfernungsmesser-Modul
1535-nm-Laser-Entfernungsmesser-Modul
1570 nm Laser-Entfernungsmesser-Modul
1,54um Laser -Entfernungsmodul
1064nm Laserzielerheber
Anti -Drohnen -Ststem -Modul
Ranging-Lidar-Modul
Anfrage absenden
Bitte zögern Sie nicht, Ihre Anfrage im untenstehenden Formular zu stellen. Wir werden Ihnen innerhalb von 24 Stunden antworten.





")