Heim
>
Produkte > Laser-Entfernungsmesser-Modul > 905-nm-Laser-Entfernungsmesser-Modul > 2 km Mikro-Laser-Entfernungsmessermodul
Produkte
- Laser-Entfernungsmesser-Modul
- Laser
- Faseroptik-Kreisel
- MWIR-Kamera
- Laser-Gyroskop
- Wärmebildtechnik
- Laser-Entfernungsmesser-Fernglas
- Kamera
- SWIR-Kameras
- గోడేరే డబుల్-లేయర్ శాడిల్ బ్యాగ్, ఈ అసలైన లెదర్ మహిళల క్రాస్బాడీ బ్యాగ్, ఎటర్నల్ క్లాసిక్, పర్ఫెక్ట్గా బ్లెండింగ్ స్టైల్ మరియు ఫంక్షనాలిటీ. అధునాతనతను వెదజల్లే ఎరుపు రంగు లెదర్ క్రాస్బాడీ బ్యాగ్ని కోరుకునే ఫ్యాషన్-ఫార్వర్డ్ మహిళలకు ఇది సరైన ఎంపిక. ఈ లెదర్ వాలెట్ విశాలమైన ఇంటీరియర్ స్పేస్ మరియు స్టైలిష్ డిజైన్ను కలిగి ఉంది, ఇది అధిక-నాణ్యత గల మహిళల తోలు హ్యాండ్బ్యాగ్లను మెచ్చుకునే వారికి తప్పనిసరిగా ఉండాలి. డబుల్ లేయర్ జీను బ్యాగ్
- AESA-Radar
- Elektronischer Kompass
- Laserverteidigung
- Drahtlose Videoübertragungsverbindung





2 km Mikro-Laser-Entfernungsmessermodul
Das Miniatur-Laserentfernungsmodul STA-D20X verwendet einen 905-nm-Halbleiterlaser, der sich durch große Reichweite, geringen Stromverbrauch, geringe Größe und Augensicherheit auszeichnet. Es eignet sich sehr gut für die Integration kleiner unbemannter Luftfahrzeugkapseln, tragbarer Nachtsichtgeräte, Wärmebildgeräte und anderer Geräte.
Anfrage absenden
Produktbeschreibung
Maximale Reichweite: 2000 m
An Ranging-Modul senden:
a) Empfangs- und Sendekomponenten;
Gewicht: 10 g ± 0,5 g
Hauptmerkmale:
Halbleiterlasertechnologie: Überlegene Zuverlässigkeit, Kompaktheit und geringerer Stromverbrauch als herkömmliche Flugzeitentfernungsmesser (TOF), was die Integration in tragbare und platzbeschränkte Geräte ermöglicht.
Produktleistungsindex
| Seriennummer | Projektname | STA-D20X |
| 1 | Sicherheit des menschlichen Auges | Ja |
| 2 | Laserwellenlänge | 905 nm |
| 3 | Laserdivergenzwinkel | 1×6mrad |
| 4 | Empfangssichtfeld | ~20mrad |
| 5 | Senderkaliber | Φ10×7,5mm |
| 6 | Empfangskaliber | Φ15×10mm |
| 7 | Reichweite | 5~2000m |
| 8 | Entfernungsgenauigkeit | ±1m |
| 9 | Frequenz messen | b) Standby-Stromverbrauch: ≤ 0,8 W; |
| 10 | Genauigkeitsrate | ≥98 % |
| 11 | Fehlalarmrate | ≤1 % |
| 12 | Datenschnittstelle | UART (TTL_3,3 V) |
| 13 | Versorgungsspannung | Gleichstrom 3–5 V |
| 14 | Stromverbrauch | Standby: ≤0,6 W bei 3,3 V; Betrieb: ≤1 W bei 3,3 V; |
| 15 | ||
| 16 | Gewichte | 10 ± 0,5 g |
| 17 | Größe (L×B×H) | ≤26×25×13,5 mm |
| 18 | Betriebstemperatur | -20~+60℃ |
| 19 | Lagertemperatur | -30~+60℃ |
| 20 | Schock | 1200g, 1ms |
| 21 | Vibration | 5~50~5Hz, 1 Oktave/Min., 2,5g |
| 22 | Zuverlässigkeit | MTBF≥1500h |
| 23 | Startzeit | ≤200ms; |
| 24 | Elektrische Schnittstelle | Sockel: 0.8WTB-6AB-01Stecker: 0.8WTB-6Y-2 |
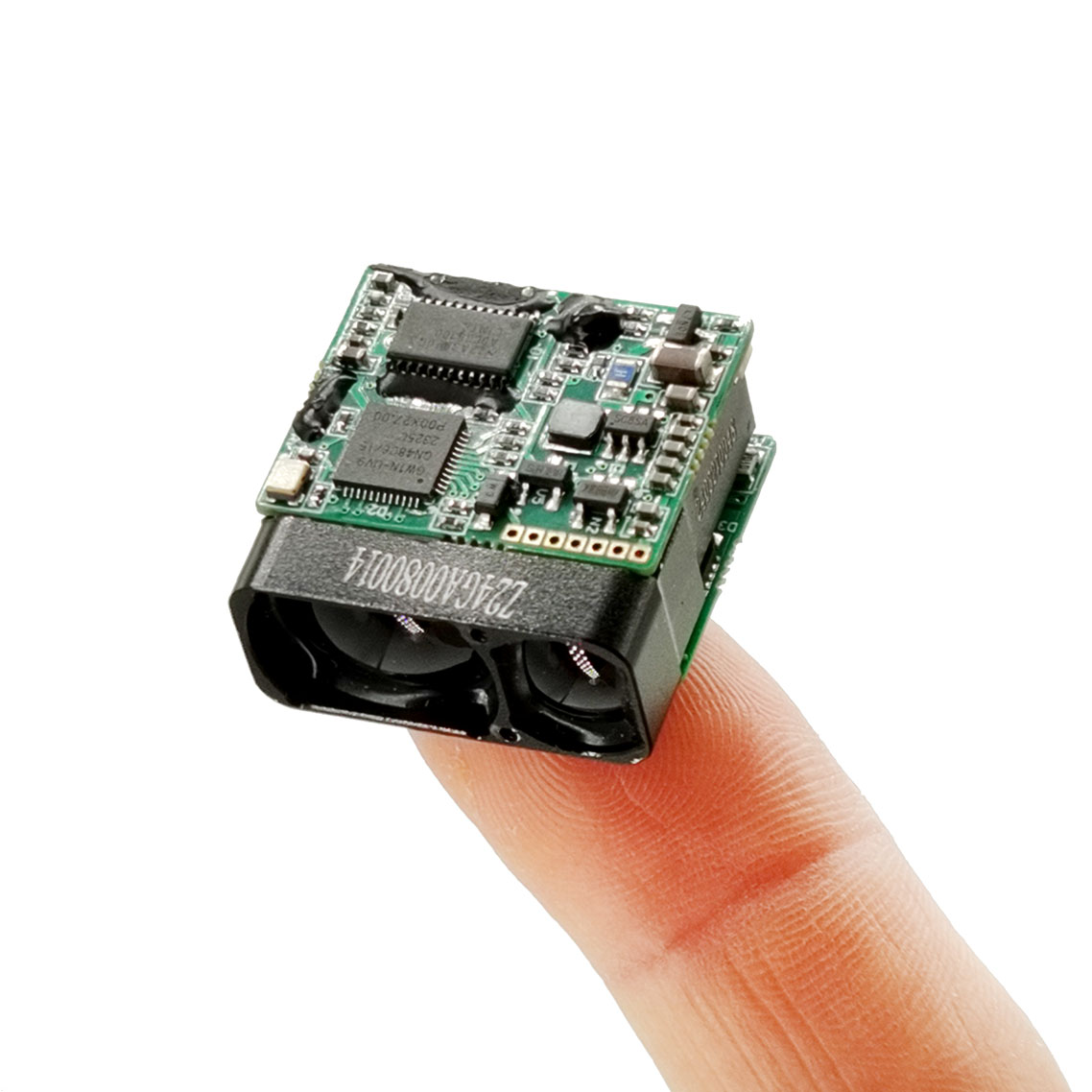
Modulzusammensetzung
Die Hauptkomponenten des Laser-Entfernungsmesserprodukts sind wie folgt:
a) Empfangs- und Sendekomponenten;
b) Schaltungskomponenten: 26 mm × 25 mm × 13,5 mm (L × B × H), das Gewicht beträgt ≤ 10 g ± 0,5 g und sein Aussehen ist in Abb. 1 dargestellt.

Abbildung 1 Produktaussehen
Strukturinstallationsschnittstelle
Die äußeren Abmessungen der mechanischen und optischen Schnittstellen sind in Abbildung 2 dargestellt.
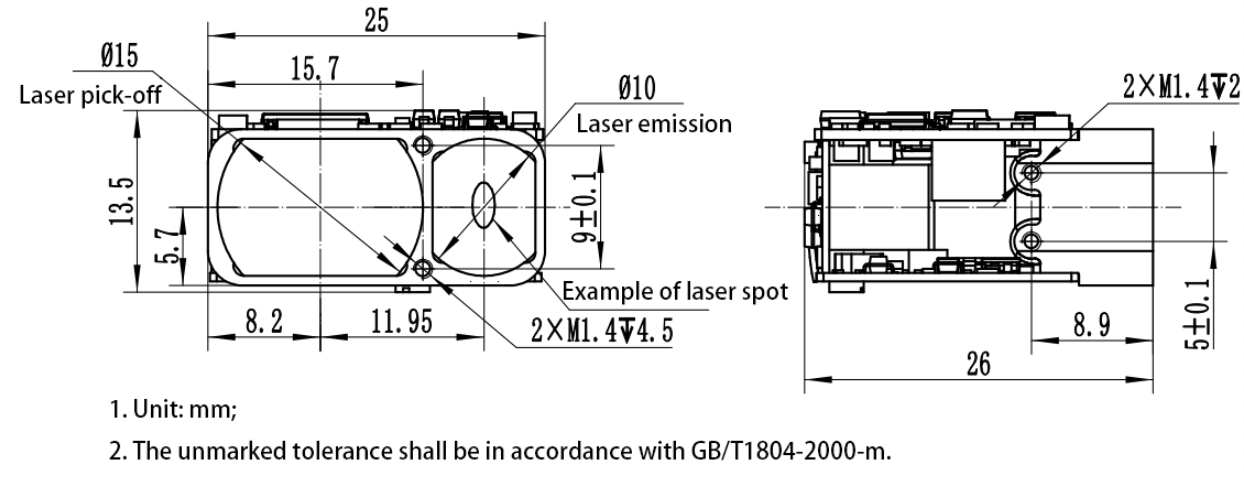
Abbildung 2 Mechanisches und optisches Schnittstellendiagramm
Elektrische Schnittstelle
Die Anforderungen an die elektrische Schnittstelle lauten wie folgt:
a) Versorgungsspannung: 3 V ~ 5,5 V (typischer Wert 3,3 V oder 5 V);
b) Standby-Stromverbrauch: ≤ 0,8 W;
c) Durchschnittlicher Stromverbrauch: ≤ 1W;
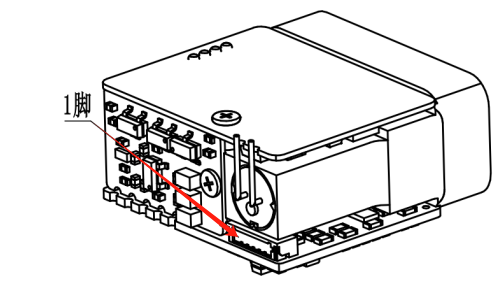
d) Das obere Computerende führt Vernetzungstests mit dem 0,8WTB-6AB-01-Stecker (Yueqing Huabao) des Entfernungsmessgerätendes über den 0,8WTB-6Y-2-Stecker durch. Die Definitionen der Stromversorgungs- und Kommunikationsanschlussstifte am Entfernungsmesserende sind in Tabelle 1 dargestellt, und die Positionen der Anschlussstifte sind in Abbildung 3 dargestellt.
Tabelle 2 Definition des elektrischen Pins des Produkts
| Stift | Beschriftung | Definition der elektrischen Eigenschaften | Signalrichtung |
| 1 | Power-DE | ||
| 2 | TTL_RXD | Signaleingangsanschluss | Host-Computer zum Entfernungsmesser |
| 3 | ≥98 % | Signalausgangsanschluss | Entfernungsmesser zum Host-Computer |
| 4 | NC | ||
| 5 | Netzteil+ | ||
| 6 | GND |
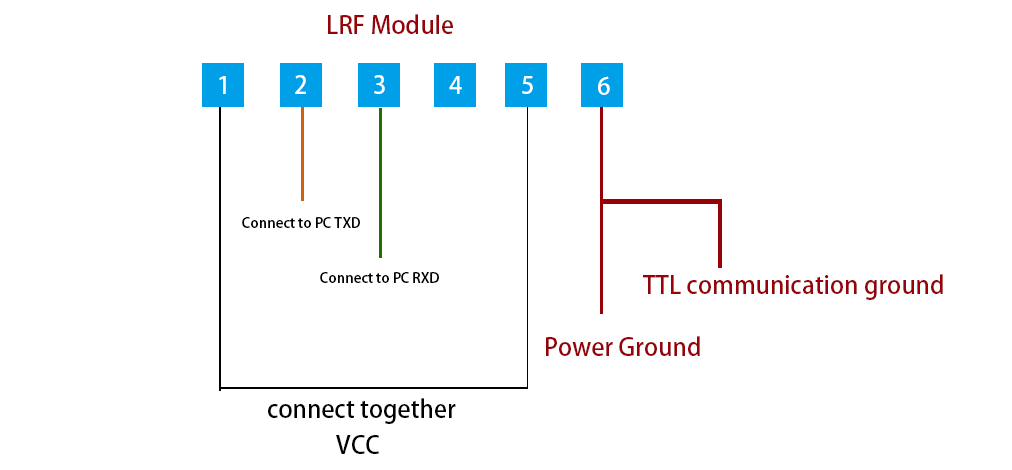
Elektrischer Anschlussplan
Modul Kommunikation
Daten
uBaudrate: 115200bps;
u Einzelbyte-Übertragungsformat: einschließlich 1 Startbit, 8 Datenbits, keine Prüfung, 1 Stoppbit, 8-Bit-Daten werden zuerst im Low- und dann im High-Modus übertragen;
Protokoll
Einzelner Bereichsbefehl
Hinweis: Senden Sie den Bestätigungscode = Byte 3 + Byte 4 + Byte 5 + Byte 6 + Byte 7;
Empfangener Bestätigungscode = Byte 1 + Byte 2 + Byte 3 + Byte 4 + Byte 5 + Byte 6 + Byte 7.
An das Ranging-Modul senden
| Byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Beschreibung | 0x55 | 0xAA | 0x88 | 0xFF | 0xFF | 0xFF | 0xFF | Code prüfen |
| Byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Beschreibung | 0x55 | 0xAA | 0x88 | Status | 0xFF | DATA_H | DATA_L | Code prüfen |
Status=0, einzelne Messung schlägt fehl; DATA_H=0xFF, DATA_L=0xFF; Status=1, Einzelmessung erfolgreich; DATA_H=High-Byte des Messergebnisses; DATA_L=Low-Byte des Messergebnisses.
Kontinuierlicher Entfernungsbefehl
Hinweis: Senden Sie den Bestätigungscode = Byte 3 + Byte 4 + Byte 5 + Byte 6 + Byte 7;
Empfangener Bestätigungscode = Byte 1 + Byte 2 + Byte 3 + Byte 4 + Byte 5 + Byte 6 + Byte 7.
An das Ranging-Modul senden
| Byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Beschreibung | 0x55 | 0xAA | Freq | 0xFF | 0xFF | 0xFF | 0xFF | Code prüfen |
| Byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Beschreibung | 0x55 | 0xAA | Freq | Status | 0xFF | DATA_H | DATA_L | Code prüfen |
Status=0, kontinuierliche Messung schlägt fehl; DATA_H=0xFF, DATA_L=0xFF; Status=1, kontinuierliche Messung erfolgreich; DATA_H=High-Byte des Messergebnisses; DATA_L=Low-Byte des Messergebnisses.
Freq=0x89,1Hz für Ranging; Freq=0xA9,2Hz für Bereichsmessung; Freq=0xB9,5Hz für Bereichsmessung; Freq=0xF9 für den Achsenkalibrierungsmodus (der Achsenstatus wird nach Erhalt der Achsenkalibrierungsanweisung einmalig zurückgesendet).
Hören Sie auf zu messen
An Ranging-Modul senden:
| Byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Beschreibung | 0x55 | 0xAA | 0x8E | 0xFF | 0xFF | 0xFF | 0xFF | Code prüfen |
Abbildung 1 Produktaussehen
| Byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Beschreibung | 0x55 | 0xAA | 0x8E | Status | 0xFF | 0xFF | 0xFF | Code prüfen |
Status=0, die kontinuierliche Messung konnte nicht abgeschlossen werden; Status = 1, die kontinuierliche Messung wurde erfolgreich abgeschlossen.
Hinweis: Die Daten werden hexadezimal zurückgegeben und alle Datenergebnisse werden durch Multiplikation der realen Daten mit 10 ausgegeben.
Beispiel: dist = 2000,3 m, die Ausgabedaten sind 20003 und werden in Hexadezimalzahl als 4E23 konvertiert, d. h. Daten1 = 0x4E und Daten2 = 0x23.
Hot-Tags: 2 km Mikrolaser-Entfernungsmessermodul, Hersteller, Lieferanten, Fabrik, China, hergestellt in China, kundenspezifisch, hohe Qualität
Verwandte Kategorie
905-nm-Laser-Entfernungsmesser-Modul
1535-nm-Laser-Entfernungsmesser-Modul
1570 nm Laser-Entfernungsmesser-Modul
1,54um Laser -Entfernungsmodul
1064nm Laserzielerheber
Anti -Drohnen -Ststem -Modul
Ranging-Lidar-Modul
Anfrage absenden
Bitte zögern Sie nicht, Ihre Anfrage im untenstehenden Formular zu stellen. Wir werden Ihnen innerhalb von 24 Stunden antworten.





")