Heim
>
Produkte > Laser-Entfernungsmesser-Modul > 1535-nm-Laser-Entfernungsmesser-Modul > 9 km Reichweite Findermodul
Produkte
- Laser-Entfernungsmesser-Modul
- Laser
- Faseroptik-Kreisel
- MWIR-Kamera
- Laser-Gyroskop
- Wärmebildtechnik
- Laser-Entfernungsmesser-Fernglas
- Kamera
- SWIR-Kameras
- గోడేరే డబుల్-లేయర్ శాడిల్ బ్యాగ్, ఈ అసలైన లెదర్ మహిళల క్రాస్బాడీ బ్యాగ్, ఎటర్నల్ క్లాసిక్, పర్ఫెక్ట్గా బ్లెండింగ్ స్టైల్ మరియు ఫంక్షనాలిటీ. అధునాతనతను వెదజల్లే ఎరుపు రంగు లెదర్ క్రాస్బాడీ బ్యాగ్ని కోరుకునే ఫ్యాషన్-ఫార్వర్డ్ మహిళలకు ఇది సరైన ఎంపిక. ఈ లెదర్ వాలెట్ విశాలమైన ఇంటీరియర్ స్పేస్ మరియు స్టైలిష్ డిజైన్ను కలిగి ఉంది, ఇది అధిక-నాణ్యత గల మహిళల తోలు హ్యాండ్బ్యాగ్లను మెచ్చుకునే వారికి తప్పనిసరిగా ఉండాలి. డబుల్ లేయర్ జీను బ్యాగ్
- AESA-Radar
- Elektronischer Kompass
- Laserverteidigung
- Drahtlose Videoübertragungsverbindung








9 km Reichweite Findermodul
STA-D0912Y 9 km Range Findermodul nimmt das 1535 nm Erbium-Glaslasermodul unabhängig von der JIOPTICS entwickelt, die die Eigenschaften eines geringen Stromverbrauchs, der kompakten Struktur, der hohen Präzision, der langen Messentfernung und der Sicherheit des Menschen aufweist.
Anfrage absenden
Produktbeschreibung
Maximaler Messbereich: 9000 m (Fahrzeug) 12000 m (Wand)
Ranggenauigkeit ± 1 m
Messgenauigkeit ≥ 98%
Gewicht ≤ 102g
Ranggenauigkeit ± 1 m
Messgenauigkeit ≥ 98%
Gewicht ≤ 102g
9 km Reichweite Findermodulfunktionen
1. Integriertes Design der gesamten Struktur, Schockfestigkeit, Schwingungsbeständigkeit, hohe Zuverlässigkeit, starke Umweltanpassungsfähigkeit;
2. Die Verwendung eines einzigartigen Erbiumglaslaser-Konfigurationsdesigns und der Endgesichts-Mehrpunktdichtungsinstallation, hoher Haltbarkeit, langer Arbeitsleben, Augensicherheit;
3. Die internen Schnittstellen des Schaltkreises nehmen alle den direkten und zuverlässigen Schweißdrahtverbindungsverfahren ein, der den Kurzschluss oder den schlechten Kontakt vermeiden kann, der durch die Lockerung, Oxidation und Wasserdampf des Steckers verursacht wird und die Zuverlässigkeit und Lebensdauer des Produkts verbessert.
2. Die Verwendung eines einzigartigen Erbiumglaslaser-Konfigurationsdesigns und der Endgesichts-Mehrpunktdichtungsinstallation, hoher Haltbarkeit, langer Arbeitsleben, Augensicherheit;
3. Die internen Schnittstellen des Schaltkreises nehmen alle den direkten und zuverlässigen Schweißdrahtverbindungsverfahren ein, der den Kurzschluss oder den schlechten Kontakt vermeiden kann, der durch die Lockerung, Oxidation und Wasserdampf des Steckers verursacht wird und die Zuverlässigkeit und Lebensdauer des Produkts verbessert.
Produktleistungsindex
| Artikel | Index | |
| Modell | STA-D0912Y | |
| Betriebswellenlänge | 1535 nm ± 10 nm | |
| Reichweite | 80 m-12000m | |
| Rangleichtigkeit | 16000 m | Typisches Ziel, Sichtbarkeit ≥ 25 km |
| 12000 m | Großes Ziel, Sichtbarkeit ≥ 25 km | |
| 9000 m | Sichtbarkeit ≥ 25 km, Ziel mit 0,3 Reflexionsvermögen für 2,3 m × 4,6 m Fahrzeuge | |
| Luftfeuchtigkeit | ≤ 80% | |
| Ranggenauigkeit | ± 1 m | |
| Genauigkeitsrate | ≥ 98% | |
| Reichweite | ≤ 50 m | |
| Divergenzwinkel | ≤ 0,5mrad | |
| Ranghäufigkeit | Einmal 1Hz, 5Hz | |
| Größe | ≤ 66 mm × 59 mm × 42 mm | |
| Stromspannung | 5v ~ 14V | |
| Arbeitsstromverbrauch | Durchschnittlicher Stromverbrauch: ≤ 3W | |
| Standby -Stromverbrauch | ≤ 0,01W | |
| Arbeitstemperatur | -40 ℃~+60 ℃ | |
| Lagertemperatur | -55 ℃~+70 ℃ | |
| Gewicht | ≤ 102g | |
Strukturinstallationsschnittstelle


Elektrische Schnittstelle
Das obere Computerende realisiert den Vernetzungstest mit dem Entfernungsmesser über den 10-Pin-Anschluss. Die Pin -Definition des Netzteils und des Kommunikationsports am RangeFinder -Ende ist in der folgenden Tabelle dargestellt, und die Position des Anschlussverbindungsstift 1 ist in der folgenden Abbildung dargestellt.
PIN -Definition des Stromversorgungs- und Kommunikationsports am Ende der Entfernung
| PIN -Nummer | Nummer | Definition der elektrischen Eigenschaften | Notizen |
| P-1 | Vin+ | Eingangsleistung positiv | Stromversorgung |
| P-2 | Com | Negativer Pol der Eingangsleistung | |
| P-3 | Power_ctl | Niedrigstromregelungsanschluss | Suspendiert oder hoch (3 V ~ 9 V) wirksam |
| P-4 | RS422_TXD+ | Signalausgangsanschluss | Rangefinder zum Hostcomputer |
| P-5 | Rs422_txd- | ||
| P-6 | Rs422_txd- | Signaleingangsanschluss | Oberer Computer zum Entfernungsmesser |
| P-7 | RS422_TXD+ | ||
| P-8 | GND | Kommunikationsbodendraht | Kommunikationsbodendraht |
| P-9 | Ttl_rxd | Signaleingangsanschluss | 3,3 V TTL |
| P-10 | Ttl_txd | Signalausgangsanschluss |
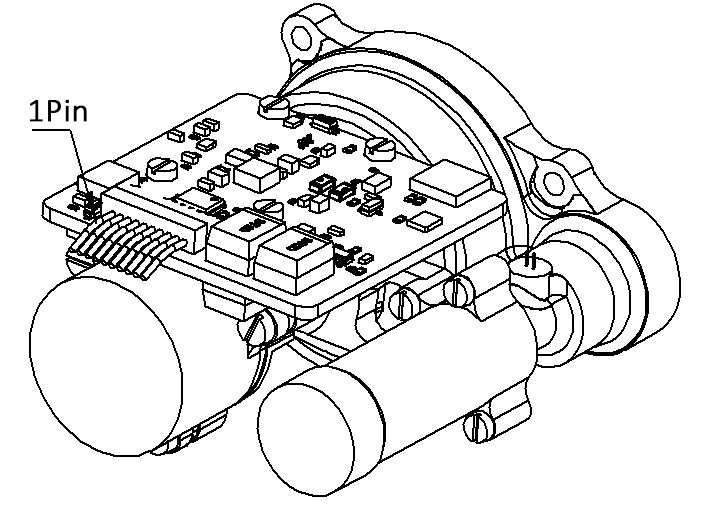
Steckverbindung 1Pin Position
Software
Daten
Daten
Die Datenübertragung zwischen dem Entfernungsmesser und dem oberen Computer enthält den folgenden Inhalt:
● Kontrollbefehl: Einschließlich einer einzelnen, 1 Hz -Rangierungsanweisung, 5Hz -Rangierungsanweisung, Abfrageanweisung usw.;
● Daten zurückgeben: einschließlich Entfernungsinformationen, Umgebungstemperatur, Entfernungsmesserstatus usw.
Der Datenaustausch zwischen dem Entfernungsmesser und dem oberen Computer verwendet RS422/TTL (Zwei-Choice 1), und seine Eigenschaften sind wie folgt:
● Baudrate: 38400 (Fabrik)/9600/57600/115200;
● Byte -Struktur: Niedrige Bestellung vorne, hohe Reihenfolge im Rücken;
● Byte-Komposition: 1-Bit-Startbit, 8-Bit-Datenbit, kein Check, 1-Bit-Stoppbit.
● Kontrollbefehl: Einschließlich einer einzelnen, 1 Hz -Rangierungsanweisung, 5Hz -Rangierungsanweisung, Abfrageanweisung usw.;
● Daten zurückgeben: einschließlich Entfernungsinformationen, Umgebungstemperatur, Entfernungsmesserstatus usw.
Der Datenaustausch zwischen dem Entfernungsmesser und dem oberen Computer verwendet RS422/TTL (Zwei-Choice 1), und seine Eigenschaften sind wie folgt:
● Baudrate: 38400 (Fabrik)/9600/57600/115200;
● Byte -Struktur: Niedrige Bestellung vorne, hohe Reihenfolge im Rücken;
● Byte-Komposition: 1-Bit-Startbit, 8-Bit-Datenbit, kein Check, 1-Bit-Stoppbit.
Information
Das Format der Steuerbefehlsinformationen ist in der folgenden Tabelle angezeigt.
Steuerbefehlsinformationen vom Entfernungsmesser empfangen
| Byte | Veranschaulichen | Byte -Daten (Befehlswörter, Daten, Bits überprüfen) | Notizen |
| 1 | Frame -Header | 0x55 |
|
| 2-5 |
|
1 Ranging: 0xf2 0x00 0x00 0xf2 | Die Feedback -Daten sind in der folgenden Tabelle angezeigt |
| 1Hz Ranging: 0xf3 0x01 0x00 0xf2 | |||
| 5Hz Ranging: 0xf3 0x02 0x00 0xf1 | |||
| Stoppen Sie die Reichweite: 0xf3 0x00 0x00 0xf3 | |||
| Einstellung der Baudrate Rate: 0xf6 _ _0xxx | ____ Setzen Sie die Baud Rate/100 (Hexadezimalvertretung), wobei 0xxx ein XOR von 2-4 Bytes ist | ||
| Self -Check -Befehl: 0xf0 0x00 0x00 0xf0 | Die Feedback -Daten sind in der folgenden Tabelle angezeigt | ||
| Anweisungen für Abfragen: 0xf8 0x00 0x00 0xf8 | |||
| Einstellung von Gating -Wert: 0xf4 ___ ___ 0xxx | ___ ist der festgelegte Strobe -Wert (hexadezimale Darstellung), und 0xxx ist der exklusive oder von 2 bis 4 Bytes. | ||
| 6 | Ende des Rahmens | 0! |
|
Die Rückgabedaten des Entfernungsmessers sind in regelmäßige Daten und Selbsttestdaten unterteilt.
● Regelmäßige Daten: einschließlich der Anzahl der Ziele, Messentfernung, Entfernungsmesserstatus usw. Siehe die folgende Tabelle.
● Abfragedaten: einschließlich Umgebungstemperatur, Entfernungsmesserstatus usw. Siehe die folgende Tabelle.
● Regelmäßige Daten: einschließlich der Anzahl der Ziele, Messentfernung, Entfernungsmesserstatus usw. Siehe die folgende Tabelle.
● Abfragedaten: einschließlich Umgebungstemperatur, Entfernungsmesserstatus usw. Siehe die folgende Tabelle.
Herkömmliche Daten, die von Distanzmessmaschinen zurückgegeben werden
| Byte | Veranschaulichen | Bytewert (hexadezimal) |
| 1 | Kopfball | 0! |
| 2 | Anzahl der Ziele |
|
| 3 | Hoher Byte der ersten Zielentfernungsinformationen |
|
| 4 | Niedrige Byte der ersten Zielentfernungsinformationen |
|
| 5 | Erste Ziel -Distanzinformationsdezimalstellen | Zwei Dezimalstellen nach dem Dezimalpunkt |
| 6 | Hohe Byte der Endzielentfernungsinformationen |
|
| 7 | Niedrige Byte der Endzielentfernungsinformationen |
|
| 8 | Last Zielentfernungsinformationen Dezimalstellen | Zwei Dezimalstellen nach dem Dezimalpunkt |
| 9 | Rangstatus -Byte | Statuswort, siehe Tabelle unten |
| 10 ~ 13 | Anzahl der Lichtausgaben |
|
| 14 | Word überprüfen | Bytes 2-13 xor |
| 15 | Ende des Rahmens | 0x55 |
Bedeutung des Statusworts
| Seriennummer | Byte 9 | Bedeutung |
| 1 | 0xf2 | 1 Rang |
| 2 | 0xf3 | 1Hz Ranging |
| 3 | 0xf4 | 5Hz Ranging |
| 4 | 0xf5 | Hör auf zu reiten |
Abfragedaten, die von Rangefinder zurückgesendet wurden
| Byte | Veranschaulichen | Bytewert (hexadezimal) |
| 1 | Frame -Header | 0xcc |
| 2 | Stehen zu | Stehen zu |
| 3 | Umgebungstemperatur Byte | 8-Bit-Signiernummer, Einheit: ℃ |
| 4 | Selbsttestinformationsbyte | 0x 00 gibt den Standardwert der Abfrage an 0x 03 zeigt an, dass das Selbstprüflicht normal ist 0xff zeigt ein abnormales selbsthandtiges Licht an |
| 5 | Hochintensitär Arbeitsstatus Byte | 1: Normalbetriebsmodus -Flag -Bit 0: Hochintensitäts Arbeitsmodus Flag-Bit |
| 6 | Entfernungsstrobewert hoher Byte | Hexadezimale Darstellung |
| 7 | Niedriger Byte des Abstands -Gating -Wertes | |
| 8 | Baud Rate Hohe Byte | Hexadezimalvertretung, Baudrate Rate ist Loopback -Daten * 100 |
| 9 | Baud Rate niedriger Byte | |
| 10 | Die Anzahl der Licht ist 8 Bit hoch | Hexadezimale Darstellung |
| 11 | ||
| 12 | Anzahl der Leuchten niedriger 8 Bit | |
| 13 | ||
| 14 | Word überprüfen | Bytes 2-13 xor |
| 15 | Ende des Rahmens | 0x55 |
Baudrate -Rateneinstellungen
Baudrate -Einstellung Betriebsmethode:
A.Send "0x 55 0xf6 0x 00 0x 60 0x 96 0xxx" Befehl des Laserbereichs Finder, i .e. Setzen Sie die Baud -Rate auf 9600 Bps; Der Entfernungsmesser gibt "CC 01 19 00 01 00 00 00 00 60 00 00 00 79 55", "0x 00 0x 60" an, dass die aktuelle Baud -Rate auf 9600 BPS festgelegt wurde.
B.Send "0x 55 0xf6 0x 01 0x 80 0x 77 0xxx" Befehl zum Laser -BereichFinder, i .e. Setzen Sie die Baudrate auf 38400 Bps; Der Entfernungsmesser gibt "CC 01 19 00 01 00 00 01 80 00 00 00 00 98 55" zurück, und "0x 01 0x 80" zeigt an, dass die aktuelle Baud -Rate auf 38400 BPS festgelegt wurde.
C.Send "0x 55 0xf6 0x 02 0x 40 0xb4 0xxx" auf den Laser -Entfernungsmesser, dh die Baud -Rate auf 57600bit / s fest; Der Entfernungsmesser sendet "CC 01 19 00 01 00 00 02 40 00 00 00 00 00 5B 55" zurück, und "0x 02 0x 40" zeigt an, dass die aktuelle Baudrate auf 57600 BPS festgelegt wurde.
D.Send "0x 55 0xf6 0x 04 0x 80 0x 72 0xxx" Befehl zum Laser -Entfernungsmesser, i .e. Setzen Sie die Baud -Rate auf 115200bit / s; Der Entfernungsmesser gibt "CC 01 19 00 01 00 04 80 00 00 00 9d 55", "0x 04 0x 80" an, dass die aktuelle Baudrate auf 115200 Bit / s festgelegt wurde.
A.Send "0x 55 0xf6 0x 00 0x 60 0x 96 0xxx" Befehl des Laserbereichs Finder, i .e. Setzen Sie die Baud -Rate auf 9600 Bps; Der Entfernungsmesser gibt "CC 01 19 00 01 00 00 00 00 60 00 00 00 79 55", "0x 00 0x 60" an, dass die aktuelle Baud -Rate auf 9600 BPS festgelegt wurde.
B.Send "0x 55 0xf6 0x 01 0x 80 0x 77 0xxx" Befehl zum Laser -BereichFinder, i .e. Setzen Sie die Baudrate auf 38400 Bps; Der Entfernungsmesser gibt "CC 01 19 00 01 00 00 01 80 00 00 00 00 98 55" zurück, und "0x 01 0x 80" zeigt an, dass die aktuelle Baud -Rate auf 38400 BPS festgelegt wurde.
C.Send "0x 55 0xf6 0x 02 0x 40 0xb4 0xxx" auf den Laser -Entfernungsmesser, dh die Baud -Rate auf 57600bit / s fest; Der Entfernungsmesser sendet "CC 01 19 00 01 00 00 02 40 00 00 00 00 00 5B 55" zurück, und "0x 02 0x 40" zeigt an, dass die aktuelle Baudrate auf 57600 BPS festgelegt wurde.
D.Send "0x 55 0xf6 0x 04 0x 80 0x 72 0xxx" Befehl zum Laser -Entfernungsmesser, i .e. Setzen Sie die Baud -Rate auf 115200bit / s; Der Entfernungsmesser gibt "CC 01 19 00 01 00 04 80 00 00 00 9d 55", "0x 04 0x 80" an, dass die aktuelle Baudrate auf 115200 Bit / s festgelegt wurde.
Hot-Tags: 9 km Rangleichtermodul, Hersteller, Lieferanten, Fabrik, China, in China hergestellt, maßgeschneidert, hohe Qualität
Verwandte Kategorie
905-nm-Laser-Entfernungsmesser-Modul
1535-nm-Laser-Entfernungsmesser-Modul
1570 nm Laser-Entfernungsmesser-Modul
1,54um Laser -Entfernungsmodul
1064nm Laserzielerheber
Anti -Drohnen -Ststem -Modul
Ranging-Lidar-Modul
Anfrage absenden
Bitte zögern Sie nicht, Ihre Anfrage im untenstehenden Formular zu stellen. Wir werden Ihnen innerhalb von 24 Stunden antworten.