Heim
>
Produkte > Laser-Entfernungsmesser-Modul > 1535-nm-Laser-Entfernungsmesser-Modul > 10 km Augen-safe Laser-Entfernungsmodul (LRF)
Produkte
- Laser-Entfernungsmesser-Modul
- Laser
- Faseroptik-Kreisel
- MWIR-Kamera
- Laser-Gyroskop
- Wärmebildtechnik
- Laser-Entfernungsmesser-Fernglas
- Kamera
- SWIR-Kameras
- గోడేరే డబుల్-లేయర్ శాడిల్ బ్యాగ్, ఈ అసలైన లెదర్ మహిళల క్రాస్బాడీ బ్యాగ్, ఎటర్నల్ క్లాసిక్, పర్ఫెక్ట్గా బ్లెండింగ్ స్టైల్ మరియు ఫంక్షనాలిటీ. అధునాతనతను వెదజల్లే ఎరుపు రంగు లెదర్ క్రాస్బాడీ బ్యాగ్ని కోరుకునే ఫ్యాషన్-ఫార్వర్డ్ మహిళలకు ఇది సరైన ఎంపిక. ఈ లెదర్ వాలెట్ విశాలమైన ఇంటీరియర్ స్పేస్ మరియు స్టైలిష్ డిజైన్ను కలిగి ఉంది, ఇది అధిక-నాణ్యత గల మహిళల తోలు హ్యాండ్బ్యాగ్లను మెచ్చుకునే వారికి తప్పనిసరిగా ఉండాలి. డబుల్ లేయర్ జీను బ్యాగ్
- AESA-Radar
- Elektronischer Kompass
- Laserverteidigung
- Drahtlose Videoübertragungsverbindung




")


10 km Augen-safe Laser-Entfernungsmodul (LRF)
STA-B1015X ist ein menschliches, augensicheres Laserabstandsmessmodul, mit dem die Zielabstand erfasst und die gemessene Entfernung durch serielle Kommunikation zum oberen Computer übertragen werden kann. Sichtbarkeit ≥ 15 km, Zielreflexionsvermögen ≥ 0,3, Luftfeuchtigkeit ≤ 80%, das Fahrzeug 2,3 m × 2,3 m (NATO -Ziel) -Izentumentfernung ≥ 10 km; Gebäudeziele maximal 18 km.
Anfrage absenden
Produktbeschreibung
Hauptfunktionen
(1) Single -Ranging und kontinuierliches Rang;
(2) Reaktion auf Laser -Rangierungsbefehle und kann jederzeit nach dem Stop -Befehl aufhören;
(3) Ausgangsabstandsdaten und Statusinformationen nach dem Impuls während der Entfernungsmessung;
(4) Es kann die kumulative Anzahl überträgter Laserimpulse melden (kein Stromverlust);
(5) Entfernungsauswahl, vordere und hintere Zielanzeige;
(6) Selbsttestfunktion.
(2) Reaktion auf Laser -Rangierungsbefehle und kann jederzeit nach dem Stop -Befehl aufhören;
(3) Ausgangsabstandsdaten und Statusinformationen nach dem Impuls während der Entfernungsmessung;
(4) Es kann die kumulative Anzahl überträgter Laserimpulse melden (kein Stromverlust);
(5) Entfernungsauswahl, vordere und hintere Zielanzeige;
(6) Selbsttestfunktion.
Produkteinführung
Das B1015X -Laser -Entfernungsmodul ist ein Militärpulslaser -Entfernungsmesser, das für Anwendungsszenarien wie Flugzeuge, unbemannte Luftfahrzeuge, Tanks und Umfang entwickelt wurde. Es hat geringer Größe, geringes Gewicht, geringem Stromverbrauch, stabile Leistung, lange Messentfernung und langes Lebensdauer, Sicherheit menschlicher Augen und andere Vorteile. Es ist eine wichtige technische Ausrüstung, um die Genauigkeit der Produktziele zu verbessern.
Produktleistungsindex für B1015X Eye-Safe LRF-Modul
| Artikel | Technischer Parameter | Anweisung |
| Modell | STA-B1015X | |
| Arbeitswellenlänge | 1535 ± 5 nm | |
| Augensicherheit | Klasse 1 (IEC 60825-1) | |
| Empfangsblende | Φ40mm | |
| Emissionsöffnung | Φ14mm | |
| Rangleichtigkeit | 50 m-15 km | |
| Reichweite | ≥ 18000 m | Maximaler Bereich, Reflexionsvermögen: 0,9, Sichtbarkeit der Beobachter 25 km |
| ≥ 15000 m | Gebäudeziele, Reflexionsvermögen: 0,6, Sichtbarkeit von Beobachtern 25 km | |
| ≥ 10000 m | NATO -Ziel | |
| ≥ 6000 m | Menschliches Ziel | |
| ≥2500 m | UAV -Ziel | |
| Mini -Reichweite | 50 m |
|
| Erkennung von Mehrziele | Bis zu 3 Ziel |
|
| Ranggenauigkeit | ± 1 m | 3d |
| Ranghäufigkeit | 1 ~ 10 Hz einstellbar |
|
| Genauigkeitsrate | ≥ 98% |
|
| Falsche Alarmrate | 1% |
|
| Divergenzwinkel | ≤ 0,3mrad |
|
| Kommunikationsschnittstelle | RS422 | Die TTL/RS232 -Schnittstelle kann angepasst werden |
| Stromspannung | 9 ~ 32V | Die Eingangsspannung kann gemäß den Anforderungen angepasst werden |
| Arbeitskraft | ≤ 3W (@10Hz) | Normaler Temperaturtest |
| Spitzenleistung | ≤ 6W | Normaler Temperaturtest |
| Mechanischer Schock | 75G, 1 ms |
|
| Arbeitstemperatur | -40 ℃~+60 ℃ |
|
| Lagertemperatur | -45 ℃~+70 ℃ |
|
| Zuverlässigkeit | MTBF ≥ 1500H |
|
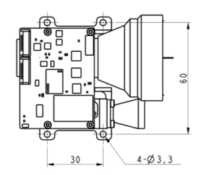
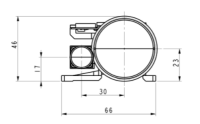
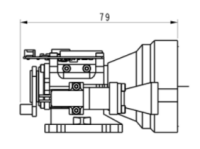
| Größe | ≤ 79 × 66 × 46 mm |
|
| Gewicht | ≤120g |
|
| Hauptfunktion | Erstes und letztes Zielbereich, Multi-Target-Laufzeit, Distanzselektivität | |
Anmerkungen:
1) NATO -Zielgröße 2,3 m × 2,3 m; Menschliche Zielgröße 0,5 m × 1,7 m; UAV -Zielgröße 0,2 m × 0,3 m; Reflexionsvermögen 30%, Beobachter -Sichtbarkeit ≥ 15 km
Strukturinstallationsschnittstelle
Externe Schnittstelle
| Stift | Definition | Funktion | Notizen |
| 1 | Rx+ | RS422 -Empfänger + | Blau |
| 2 | Rx- | RS422 -Empfänger - | Grün |
| 3 | Tx- | RS422 -Übertragung - | Lila |
| 4 | Tx+ | RS422 -Übertragung + | Gelb |
| 5 | GND | Kommunikationsbodendraht | Weiß |
| 6 | VEE | Stromversorgung + | Rot |
| 7 | GND | Stromversorgung - | Schwarz |
| 8 | Pwn und | / | Asche |
Umweltanpassungsfähigkeit
A) Arbeitstemperatur: -40 ℃~+60 ℃.
b) Lagertemperatur: -45 ℃~+70 ℃.
C) Zufallsvibration: 15 ~ 2000Hz, 3 Richtungen. Die spezifischen Testbedingungen sind in Tabelle 1 dargestellt.
b) Lagertemperatur: -45 ℃~+70 ℃.
C) Zufallsvibration: 15 ~ 2000Hz, 3 Richtungen. Die spezifischen Testbedingungen sind in Tabelle 1 dargestellt.
Tabelle 1 zufällige Vibrationstestbedingungen
| Seriennummer | Frequenzbereich (Hz) | Beschleunigungsspektraldichte (G2/Hz) | Vibrationszeit (min) |
| 1 | 15 ~ 190 | 0.01 | Vibration in jeder Richtung 15 min |
| 2 | 190 ~ 210 | 0.1 | |
| 3 | 210 ~ 380 | 0.01 | |
| 4 | 380 ~ 420 | 0.025 | |
| 5 | 420 ~ 2000 | 0.01 |
OEM/ODM -Rangermodule und benutzerdefinierte Lösungen
Der B1015X ist für Systemintegratoren ausgelegt, die nach einer bequemen, leistungsstarken und kompakten Laserlösung suchen. Es bietet eine zuverlässige Leistung in einer Vielzahl von Anwendungen.
Es ist sehr klein, ultraleuchten, hat einen geringen Stromverbrauch und kann über eine lange Entfernung gemessen werden. Es eignet sich für Handheld -Geräte (thermische Bildgebung), Waffenmontageanwendungen, tragbare Systeme und leichte Sensor -Suiten und unbemannte Luftfahrzeuge oder UGVs.
Es ist sehr klein, ultraleuchten, hat einen geringen Stromverbrauch und kann über eine lange Entfernung gemessen werden. Es eignet sich für Handheld -Geräte (thermische Bildgebung), Waffenmontageanwendungen, tragbare Systeme und leichte Sensor -Suiten und unbemannte Luftfahrzeuge oder UGVs.
Protokoll kommunizieren
1. Transmissionsprotokoll: Asynchrone serielle Kommunikation;
2. Hafenrate: 115200;
3.. Datenbits: 10Bit: Ein Startbit, 8 Datenbits, ein Stopbit, ungültige Überprüfung;
4. Datenstruktur: Die Daten bestehen aus dem Header -Byte, dem Befehlsteil, der Datenlänge, dem Parameterteil und dem Prüf -Byte;
5. Kommunikationsmodus: Das Master Control sendet Steuerbefehle an die Rangliste, und die Rangliste empfängt und führt die Anweisungen aus. Im Bereich des Fernbereichs sendet die Fernstufe die Daten und den Status der Rangliste gemäß dem Rangendrammzyklus wieder an den oberen Computer. Das Kommunikationsformat und der Befehlsinhalt sind in der folgenden Tabelle angezeigt.
A) Hauptkontrolle sendet
Das Format der zu sendenden Nachricht lautet wie folgt:
2. Hafenrate: 115200;
3.. Datenbits: 10Bit: Ein Startbit, 8 Datenbits, ein Stopbit, ungültige Überprüfung;
4. Datenstruktur: Die Daten bestehen aus dem Header -Byte, dem Befehlsteil, der Datenlänge, dem Parameterteil und dem Prüf -Byte;
5. Kommunikationsmodus: Das Master Control sendet Steuerbefehle an die Rangliste, und die Rangliste empfängt und führt die Anweisungen aus. Im Bereich des Fernbereichs sendet die Fernstufe die Daten und den Status der Rangliste gemäß dem Rangendrammzyklus wieder an den oberen Computer. Das Kommunikationsformat und der Befehlsinhalt sind in der folgenden Tabelle angezeigt.
A) Hauptkontrolle sendet
Das Format der zu sendenden Nachricht lautet wie folgt:
| STX0 | CMD | Len | Data1h | Data1l | Chk |
Tabelle 2 Formatbeschreibung der gesendeten Nachricht
| Bestellnummer | Name | erklären | Code | Anmerkungen |
| 1 | STX0 | Message Start Flag | A5 (h) |
|
| 2 | CMD | CW | Siehe Tabelle 3 |
|
| 3 | Len | Dl | Die Anzahl aller Bytes mit Ausnahme des Startmarks, des Befehlsworts und der Prüfsumme |
|
| 4 | Datah | Parameter | Siehe Tabelle 3 |
|
| 5 | Ankunft |
|
||
| 6 | Chk | XOR -Überprüfung | Mit Ausnahme des gültigen Byte sind alle anderen Bytes XORed |
|
Der Befehl wird wie folgt beschrieben:
Tabelle 3 Beschreibung der Befehle und Datenwörter, die vom Master an die Rangliste gesendet wurden
Tabelle 3 Beschreibung der Befehle und Datenwörter, die vom Master an die Rangliste gesendet wurden
| Bestellnummer | CW | Funktion | Daten Byte | Anmerkungen | Länge | Beispielcode |
| 1 | 0x00 | aufhören | Datah = 00 (H) Datal = 00 (H) | Der Entfernungsmesser stoppt die Messung | Sechs Bytes | A5 00 02 00 A7 |
| 2 | 0x01 | Single Ranging | Datah = 00 (H) Datal = 00 (H) |
|
Sechs Bytes | A5 01 02 00 00 A6 |
| 3 | 0x02 | Kontinuierlich reicht | Datah = xx (h) datal = yy (h) | Daten beschreibt den Rangzeitraum in MS | Sechs Bytes | A5 02 02 03 E8 4E (1 Hz Ranging) |
| 4 | 0x03 | Selbstprüfung | Datah = 00 (H) Datal = 00 (H) |
|
Sechs Bytes | A5 02 02 00 A4 |
| 5 | 0x04 | Stellen Sie den nächsten Abstand zur Auswahl ein | Datah = xx (h) datal = yy (h) | Daten beschreiben den Wert der Blindzonen, Einheit 1M | Sechs Bytes | A5 04 02 00 64 C7 (100 m ist die engste Entfernung) |
| 6 | 0x06 | Kumulative Anzahl von Lichtausgabebestnungen | Datah = 00 (H) Datal = 00 (H) | Kumulative Anzahl von Lichtausgabebestnungen | Sechs Bytes | A5 06 02 00 A1 |
| 7 | 0x11 | APD -Kraft ist eingeschaltet | Datah = 00 (H) Datal = 00 (H) |
|
Sechs Bytes | A5 11 02 00 B6 |
| 8 | 0x12 | APD -Kraft ist ausgeschaltet | Datah = 00 (H) Datal = 00 (H) |
|
Sechs Bytes | A5 12 02 00 B5 |
| 9 | 0xEB | Zahlenabfrage | Datah = 00 (H) Datal = 00 (H) | Zahlenabfrage | Sechs Bytes | A5 EB 02 00 00 4c |
a) Hauptsteuerung erhält das Format
Das Format der empfangenen Nachricht lautet wie folgt:
Das Format der empfangenen Nachricht lautet wie folgt:
| STX0 | CMD | Len | Daten | Datum0 | Chk |
Tabelle 4 Format Beschreibung empfangener Nachrichten
| Bestellnummer | Name | erklären | Code | Anmerkungen |
| 1 | STX0 | Meldung Start Flag 1 | A5 (h) |
|
| 2 | CMD_JG | Datenbefehlswort | Siehe Tabelle 5 |
|
| 3 | Len | Dl | Die Anzahl aller Bytes mit Ausnahme des Startmarks, des Befehlsworts und der Prüfsumme |
|
| 4 | Dn | Parameter | Siehe Tabelle 5 |
|
| 5 | D0 |
|
||
| 6 | Chk | XOR -Überprüfung | Mit Ausnahme des gültigen Byte sind alle anderen Bytes XORed |
|
Hauptregelungsstatus Beschreibung:
Tabelle 5 beschreibt das vom Entfernungsmesser an den Master Controller gesendete Datenwort
Tabelle 5 beschreibt das vom Entfernungsmesser an den Master Controller gesendete Datenwort
| Bestellnummer | CW | Funktion | Daten Byte | Anmerkungen | Gesamtlänge |
| 1 | 0x00 | aufhören | D1 = 00 (H) D0 = 00 (H) |
|
Sechs Bytes |
| 2 | 0x03 | Selbstprüfung | D8 ~ d1 | D8-D7: -5 V-Spannung, Einheit 0.01V.D6-D5: Blindfleckwert, Einheit 1MD4: APD-Hochspannungswert, Einheit V; D3: Zeichenstyp, Angabe der APD-Temperatur, Einheit: Grad Celsius; D2-D1: +5 V-Spannung, Einheit 0,01V | 12 Bytes |
| 3 | 0x04 | Entfernung zur nächsten Zugangseinstellung, Einheit m | D1 D0 | Daten beschreiben den nächsten Abstandswert, Einheit 1M; Start hoch und enden niedrig | Sechs Bytes |
| 4 | 0x06 | Kumulative Anzahl von Lichtausgabebestnungen | D3 ~ D0 | Daten drücken die Anzahl der Lichter aus, 4 Bytes, zuerst mit dem hohen Byte | Sieben Bytes |
| 5 | 0x11 | APD -Kraft ist eingeschaltet | D1 = 00 (H) D0 = 00 (H) | APD -Kraft ist eingeschaltet | Sechs Bytes |
| 6 | 0x12 | APD -Ausschalten | D1 = 00 (H) D0 = 00 (H) | APD -Kraft ist ausgeschaltet | Sechs Bytes |
| 7 | 0xed | Überstunden arbeiten | 0x00 0x00 | Der Laser steht im Laserarbeitsschutz und kann nicht gemessen werden. | Sechs Bytes |
| 8 | 0xee | Effektivitätsfehler | 0x00 0x00 |
|
Sechs Bytes |
| 9 | 0xef | Seriennort -Kommunikationszeitüberschreitung | 0x00 0x00 |
|
Sechs Bytes |
| 10 | 0x01 | Einzelbereichsmessung (Einzelziel, Null für das zweite und dritte Ziel, Null für das dritte Ziel am Anfang und am Ende des Ziels) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 erster Zielabstand (Einheit 0,1 m) D5-D3-Abstand zum zweiten Ziel (Einheit: 0,1 m) D2-D0 Dritter Zielabstand (Einheit 0,1 m) 3. Die Ziele sind von nahezu Fard9 (Bit7-Bit0) Flag-Byte: D9 ist die 7. Position, die die Hauptwelle anzeigt; 1: Es gibt eine Hauptwelle, 0: keine Hauptwelle. D9 ist die 6. Position, die Echo anzeigt; 1: Es gibt Echo, 0: nein echod9 Die fünfte Position zeigt den Laserstatus an. 1: Normaler Laser, 0: Laser Faustd9 ist das vierte Bit des Zeitlimits, 1: Normal, 0: Timeoutd9 ist an der 3. Position ungültig (auf 1 gesetzt); d9 Die zweite Position zeigt den APD -Status an; 1: Normal, 0: Errord9 ist die erste Position, die angibt, ob es ein vorheriges Ziel gibt; 1: Es gibt ein vorheriges Ziel, 0: kein vorheriges Ziel (Ziel im blinden Bereich) .D9 Das 0. Bit zeigt an, ob es ein nachfolgendes Ziel gibt; 1: Es gibt ein nachfolgendes Ziel, 0: kein nachfolgendes Ziel (das Ziel nach dem Hauptziel ist das nachfolgende Ziel) | 14 Bytes |
| 11 | 0x02 | Kontinuierliches Ranging (Einzelziel, Null für das zweite und dritte Ziel, Null für das dritte Ziel am Anfang und am Ende des Ziels) | D9 D8 D7 D6D5 D4D2 D1 D0 | D8-D6 erster Zielabstand (Einheit 0,1 m) D5-D3-Abstand zum zweiten Ziel (Einheit: 0,1 m) D2-D0 Dritter Zielabstand (Einheit 0,1 m) 3. Die Ziele von nahezu Fard9 (Bit7-Bit0) Flag-Byte: D9 ist das 7. Bit, um die Hauptwelle anzuzeigen; 1: Es gibt eine Hauptwelle, 0: keine Hauptwelle. D9 ist die 6. Position, die Echo anzeigt; 1: Es gibt Echo, 0: nein echod9 Die fünfte Position zeigt den Laserstatus an. 1: Normaler Laser, 0: Laser Faustd9 ist das vierte Bit des Zeitlimits, 1: Normal, 0: Timeoutd9 ist an der 3. Position ungültig (auf 1 gesetzt); d9 Die zweite Position zeigt den APD -Zustand an; 1: Normal, 0: Errord9 ist die erste Position, die angibt, ob es ein vorheriges Ziel gibt; 1: Es gibt ein vorheriges Ziel, 0: kein vorheriges Ziel (Ziel im blinden Bereich) .D9 Das 0. Bit zeigt an, ob es ein nachfolgendes Ziel gibt; 1: Es gibt ein nachfolgendes Ziel, 0: kein nachfolgendes Ziel (das Ziel nach dem Hauptziel ist das nachfolgende Ziel) | 14 Bytes |
| 12 | 0xEB | Zahlenabfrage | D17 …… D0 | D17 D16 D15 D14 D13 D12 Ganzmaschinenmodell coded11D10 Produktnummerd9 D6 Software VersionD5 D4 APD Numberd3 D2 Laser Numbersion D1 von FPGA | 22 Bytes |
| HINWEIS: ① undefined Data Byte/Bit, Standard ist 0; | |||||
Hot-Tags: 10 km Augen-safe Laser-Entfernungsmodul (LRF), Hersteller, Lieferanten, Fabrik, China, in China hergestellt, maßgeschneidert, hohe Qualität
Verwandte Kategorie
905-nm-Laser-Entfernungsmesser-Modul
1535-nm-Laser-Entfernungsmesser-Modul
1570 nm Laser-Entfernungsmesser-Modul
1,54um Laser -Entfernungsmodul
1064nm Laserzielerheber
Anti -Drohnen -Ststem -Modul
Ranging-Lidar-Modul
Anfrage absenden
Bitte zögern Sie nicht, Ihre Anfrage im untenstehenden Formular zu stellen. Wir werden Ihnen innerhalb von 24 Stunden antworten.