Heim
>
Produkte > Laser-Entfernungsmesser-Modul > Anti -Drohnen -Ststem -Modul > 2mrad 1 km Laser -Entfernungsmodul für Anti -Drohnen -Stsem
Produkte
- Laser-Entfernungsmesser-Modul
- Laser
- Faseroptik-Kreisel
- MWIR-Kamera
- Laser-Gyroskop
- Wärmebildtechnik
- Laser-Entfernungsmesser-Fernglas
- Kamera
- SWIR-Kameras
- గోడేరే డబుల్-లేయర్ శాడిల్ బ్యాగ్, ఈ అసలైన లెదర్ మహిళల క్రాస్బాడీ బ్యాగ్, ఎటర్నల్ క్లాసిక్, పర్ఫెక్ట్గా బ్లెండింగ్ స్టైల్ మరియు ఫంక్షనాలిటీ. అధునాతనతను వెదజల్లే ఎరుపు రంగు లెదర్ క్రాస్బాడీ బ్యాగ్ని కోరుకునే ఫ్యాషన్-ఫార్వర్డ్ మహిళలకు ఇది సరైన ఎంపిక. ఈ లెదర్ వాలెట్ విశాలమైన ఇంటీరియర్ స్పేస్ మరియు స్టైలిష్ డిజైన్ను కలిగి ఉంది, ఇది అధిక-నాణ్యత గల మహిళల తోలు హ్యాండ్బ్యాగ్లను మెచ్చుకునే వారికి తప్పనిసరిగా ఉండాలి. డబుల్ లేయర్ జీను బ్యాగ్
- AESA-Radar
- Elektronischer Kompass
- Laserverteidigung
- Drahtlose Videoübertragungsverbindung







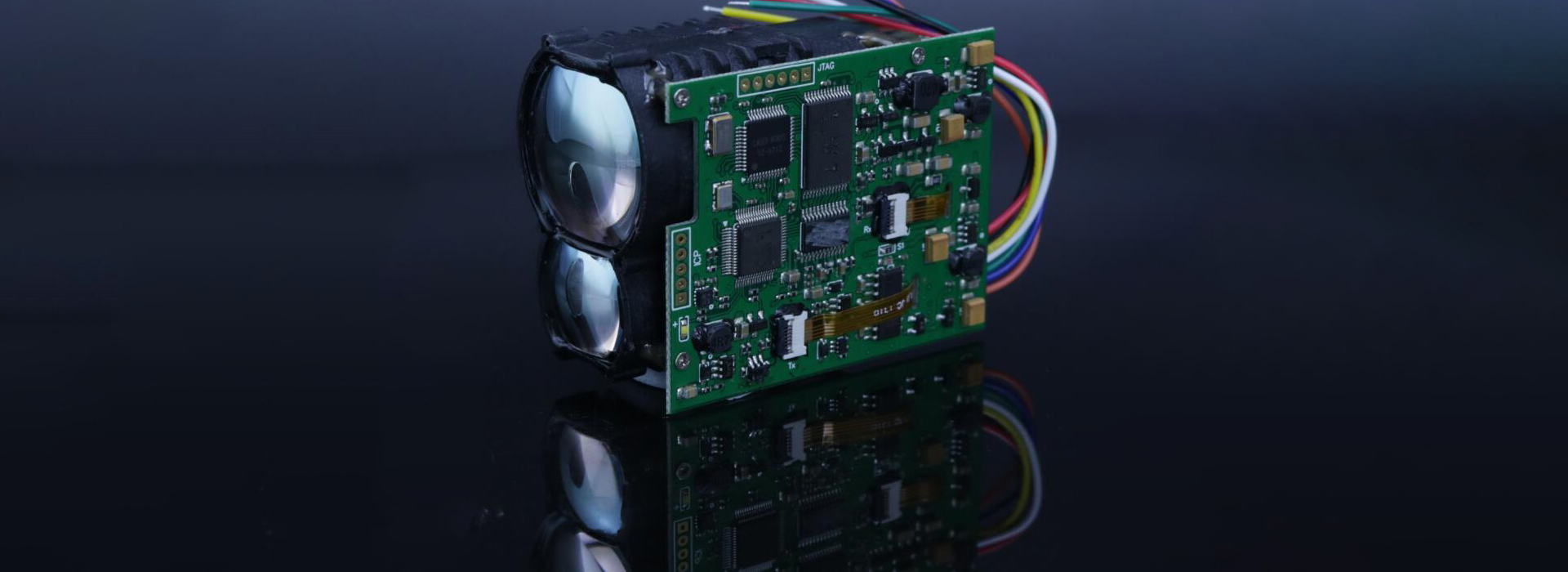
2mrad 1 km Laser -Entfernungsmodul für Anti -Drohnen -Stsem
Das kompakte STA-WR1000X-Laser-Entfernungsmodul ist für die Integration in die Luftverteidigungssysteme der Armee und der Marine sehr geeignet. Das Entfernungsmessmodul verwendet den fortschrittlichsten Pumpen -ERBIUM -Glaslaser mit hoher Verfügbarkeit und geringer Wartungskosten. Sein 2-mrad-Divergenzwinkel kann UAVs mit einem Querschnitt von 0,1 ㎡ bis zu 1000 Metern messen, was ihn zu einem wichtigen Bestandteil von Anti-Drohnen-Systemen macht.
Anfrage absenden
Produktbeschreibung
1) einzelne Rangliste und kontinuierliches Rang;
2) Reagieren auf Laser -Fernbefehle und Stop -Turning jederzeit gemäß dem Stop -Befehl;
3) Ausgaben von Distanzdaten und Statusinformationen einmal pro Impuls während des Laufens;
4) Es kann die kumulative Anzahl von übertragenen Laserimpulsen melden (kein Stromverlust);
5) Entfernungsauswahl vor und nach der Zielanzeige;
6) Selbsttestfunktion.
2) Reagieren auf Laser -Fernbefehle und Stop -Turning jederzeit gemäß dem Stop -Befehl;
3) Ausgaben von Distanzdaten und Statusinformationen einmal pro Impuls während des Laufens;
4) Es kann die kumulative Anzahl von übertragenen Laserimpulsen melden (kein Stromverlust);
5) Entfernungsauswahl vor und nach der Zielanzeige;
6) Selbsttestfunktion.
Laser -Rangierungsfunktion;
Laserbestrahlungsfunktion;
photoelektrisches Isolationssignalauslöser;
zerlegtes Strahl;
externe Triggerfunktion;
Laserbestrahlungsfunktion;
photoelektrisches Isolationssignalauslöser;
zerlegtes Strahl;
externe Triggerfunktion;
Haupttechnische Indikatoren
| Optischer Index | |
| Wellenlänge | 1535 nm ± 5 nm |
| Laserdivergenzwinkel | ≤ 2mrad |
| Effektive Empfangsöffnung | 25mm |
| Bereichsfrequenz | Single, 1 ~ 10 Hz einstellbar |
| Reichweite | Sichtbarkeit ≥ 12 km, Zielreflektivität ≥ 0,3, Luftfeuchtigkeit ≤ 80%, UAV -Rangentfernung (0,25 m × 0,25 m) ≥ 2 km |
| Ranggenauigkeit | ≤ ± 1 m (rms) |
| Genauigkeitsmessung | ≥ 98% |
| Falsche Alarmrate | ≤ 1% |
| Mindestmessbereich | ≤ 30 m |
| Stabilität der Laserachse | ≤ 0,05mrad |
| Die optische Achse ist parallel zur Installationsreferenz | ≤ 0,3mrad |
| Mechanische Indikatoren | |
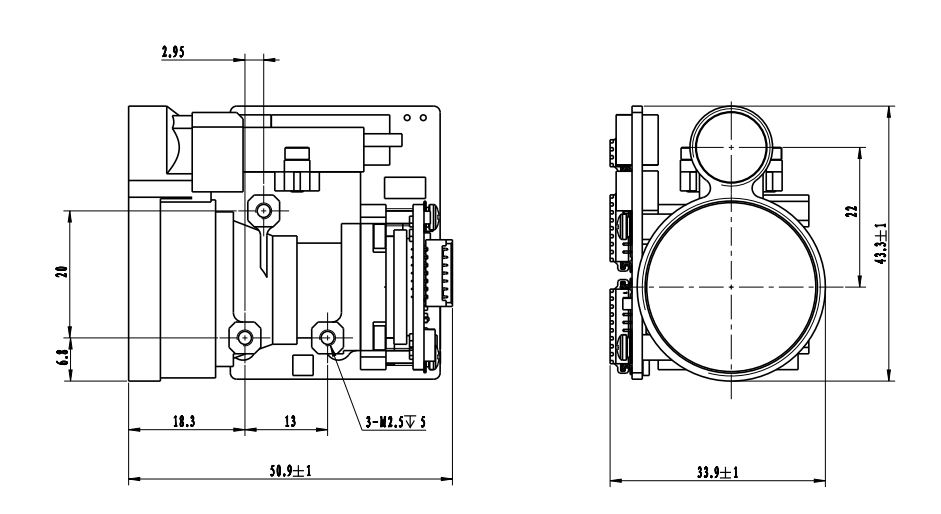
| Größe | ≤52 mm × 45 mm × 35 mm |
| Gewicht | ≤ 75 g |
| Elektrische Indikatoren | |
| Strom liefern | DC9V ~ 32V |
| Leistungsdissipation | Arbeiten Sie weniger als 3W bei 10 Hz, Spitzenstromverbrauch weniger als 5W |
| Schnittstelle | RS422 -Schnittstelle, 115200bit / s |
| Einschalten der Steuerschnittstelle | Wenn die sichere Entfernung erreicht ist, setzen Sie ihn an und verwenden Sie sie; oder im niedrigen Power -Modus, um seinen Arbeitszustand zu steuern |
| Schutz der Leiterplatte | Nachdem das Design und das Debuggen der Leiterplatte abgeschlossen sind |
| Umwelteigentum | |
| Arbeitstemperatur | -40 ℃ -65 ℃ |
| Lagertemperatur | -55 ℃ -70 ℃ |
| Vibrieren | GJB150.16 A-2009 "Military Equipment Laboratory Environmental Test Methods-Vibrationstest" " |
| Peitsche | GJB150.18 A-2009 "Military Equipment Laboratory Environmental Test Method-Impact-Test" |
Notiz:
1. REGING -RANGE Beschreibung: Der Bereich ändert sich unter verschiedenen Testbedingungen und Testzielen. Wenn Sie spezielle Ziele erkennen, wenden Sie sich bitte an die Verkaufsseite, um dies zu bestätigen.
2.Minimum-Bereich: 30m-100m Schwankungen, es wird nach normalem Gebrauch 50 m empfohlen. Aufgrund der Laserenergie kann der Nutzungsgebrauch aus nächster Nähe den Detektorchip verbrennen. Bei der Debugging bringen Sie bitte eine gute Spiegelabdeckung mit, um zu verhindern, dass der Detektorchip verbrannt wird.
2.Minimum-Bereich: 30m-100m Schwankungen, es wird nach normalem Gebrauch 50 m empfohlen. Aufgrund der Laserenergie kann der Nutzungsgebrauch aus nächster Nähe den Detektorchip verbrennen. Bei der Debugging bringen Sie bitte eine gute Spiegelabdeckung mit, um zu verhindern, dass der Detektorchip verbrannt wird.
Mechanisches Strukturdiagramm
Anforderungen an elektrische Schnittstellen
Kommunikationsschnittstelle: RS422,115200bit / s, 1 Startbit, 8 Datenbits, 1 Stoppbit, keine Parität;
Tabelle 2 Schnittstellenliniendefinition
Tabelle 2 Schnittstellenliniendefinition
| Stift | Definition | Funktion | Anmerkungen |
| 1 | Rx+ | RS422 erhält positiv |
|
| 2 | Rx- | RS422 erhält negativ |
|
| 3 | Tx- | RS422 sendet negativ |
|
| 4 | Tx+ | RS422 sendet positiv |
|
| 5 | GND |
|
|
| 6 | VEE | 9-32V |
|
| 7 | GND |
|
|
| 8 | Pwr_en | verpflichten | Schlafkontrolle |
1. Weitere Informationen
1) STA-WR1000X-Rangierungsmodul wird speziell verwendet, um den Abstand von UAV zu messen.
2) Die Spezifikationen können von Zeit zu Zeit überarbeitet werden. Bitte bestätigen Sie die Größenspezifikationen der Produkte mit dem Verkäufer, bevor Sie eine Bestellung aufgeben.
3) Das Rangierungsmodul verwendet ein einheitliches Kommunikationsprotokoll und einen oberen Computer. Wenn Sie es anrufen müssen, wenden Sie sich bitte an den Verkäufer.
2. Protokoll kommunizieren
1) Transmissionsprotokoll: Asynchrone serielle Kommunikation;
2) Baudrate: 115200;
3) Datenbits: 10Bit: Ein Startbit, 8 Datenbits, 1 Stoppbit, ungültige Überprüfung;
4) Datenstruktur: Die Daten bestehen aus dem ersten Byte, dem Befehlsteil, der Datenlänge, dem Parameterteil und dem Check -Byte;
5) Kommunikationsmodus: Der Master sendet Kontrollbefehle an die Fernmaschine, und die Rangliste empfängt und führt die Anweisungen aus. Im Bereich des Fernbereichs sendet die Fernstufe die Daten und den Status der Rangliste gemäß dem Rangendrammzyklus wieder an den oberen Computer. Das Kommunikationsformat und der Befehlsinhalt sind in der folgenden Tabelle angezeigt.
a) Hauptkontrolle sendet
Das Format der zu sendenden Nachricht lautet wie folgt:
1) STA-WR1000X-Rangierungsmodul wird speziell verwendet, um den Abstand von UAV zu messen.
2) Die Spezifikationen können von Zeit zu Zeit überarbeitet werden. Bitte bestätigen Sie die Größenspezifikationen der Produkte mit dem Verkäufer, bevor Sie eine Bestellung aufgeben.
3) Das Rangierungsmodul verwendet ein einheitliches Kommunikationsprotokoll und einen oberen Computer. Wenn Sie es anrufen müssen, wenden Sie sich bitte an den Verkäufer.
2. Protokoll kommunizieren
1) Transmissionsprotokoll: Asynchrone serielle Kommunikation;
2) Baudrate: 115200;
3) Datenbits: 10Bit: Ein Startbit, 8 Datenbits, 1 Stoppbit, ungültige Überprüfung;
4) Datenstruktur: Die Daten bestehen aus dem ersten Byte, dem Befehlsteil, der Datenlänge, dem Parameterteil und dem Check -Byte;
5) Kommunikationsmodus: Der Master sendet Kontrollbefehle an die Fernmaschine, und die Rangliste empfängt und führt die Anweisungen aus. Im Bereich des Fernbereichs sendet die Fernstufe die Daten und den Status der Rangliste gemäß dem Rangendrammzyklus wieder an den oberen Computer. Das Kommunikationsformat und der Befehlsinhalt sind in der folgenden Tabelle angezeigt.
a) Hauptkontrolle sendet
Das Format der zu sendenden Nachricht lautet wie folgt:
| STX0 | CMD | Len | Data1h | Data1l | Chk |
Tabelle 2 Formatbeschreibung der gesendeten Nachricht
| Bestellnummer | Name | erklären | Code | Anmerkungen |
| 1 | STX0 | Message Start Flag | A5 (h) |
|
| 2 | CMD | CW | Siehe Tabelle 3 |
|
| 3 | Len | Dl | Die Anzahl aller Bytes mit Ausnahme des Startmarks, des Befehlsworts und der Prüfsumme |
|
| 4 | Datah | Parameter | Siehe Tabelle 3 |
|
| 5 | Ankunft |
|
||
| 6 | Chk | XOR -Überprüfung | Mit Ausnahme des gültigen Byte sind alle anderen Bytes XORed |
|
Der Befehl wird wie folgt beschrieben:
Tabelle 3 Beschreibung der Befehle und Datenwörter, die vom Master an die Rangliste gesendet wurden
Tabelle 3 Beschreibung der Befehle und Datenwörter, die vom Master an die Rangliste gesendet wurden
| Bestellnummer | CW | Funktion | Daten Byte | Anmerkungen | Länge | Beispielcode |
| 1 | 0x00 | aufhören | Datah = 00 (H) Datal = 00 (H) | Der Entfernungsmesser stoppt die Messung | Sechs Bytes | A5 00 02 00 A7 |
| 2 | 0x01 | Single Ranging | Datah = 00 (H) Datal = 00 (H) |
|
Sechs Bytes | A5 01 02 00 00 A6 |
| 3 | 0x02 | Kontinuierlich reicht | Datah = xx (h) datal = yy (h) | Daten beschreibt den Rangzeitraum in MS | Sechs Bytes | A5 02 02 03 E8 4E (1 Hz Ranging) |
| 4 | 0x03 | Selbstprüfung | Datah = 00 (H) Datal = 00 (H) |
|
Sechs Bytes | A5 02 02 00 A4 |
| 5 | 0x04 | Stellen Sie den nächsten Abstand zur Auswahl ein | Datah = xx (h) datal = yy (h) | Daten beschreiben den Wert der Blindzonen, Einheit 1M | Sechs Bytes | A5 04 02 00 64 C7 (100 m ist die engste Entfernung) |
| 6 | 0x06 | Kumulative Anzahl von Lichtausgabebestnungen | Datah = 00 (H) Datal = 00 (H) | Kumulative Anzahl von Lichtausgabebestnungen | Sechs Bytes | A5 06 02 00 A1 |
| 7 | 0x11 | APD -Kraft ist eingeschaltet | Datah = 00 (H) Datal = 00 (H) |
|
Sechs Bytes | A5 11 02 00 B6 |
| 8 | 0x12 | APD -Kraft ist ausgeschaltet | Datah = 00 (H) Datal = 00 (H) |
|
Sechs Bytes | A5 12 02 00 B5 |
| 9 | 0xEB | Zahlenabfrage | Datah = 00 (H) Datal = 00 (H) | Zahlenabfrage | Sechs Bytes | A5 EB 02 00 00 4c |
b) Hauptsteuerung erhält das Format
Das Format der empfangenen Nachricht lautet wie folgt:
Das Format der empfangenen Nachricht lautet wie folgt:
| STX0 | CMD | Len | Daten | Datum0 | Chk |
Tabelle 4 Format Beschreibung empfangener Nachrichten
| Bestellnummer | Name | erklären | Code | Anmerkungen |
| 1 | STX0 | Meldung Start Flag 1 | A5 (h) |
|
| 2 | CMD_JG | Datenbefehlswort | Siehe Tabelle 5 |
|
| 3 | Len | Dl | Die Anzahl aller Bytes mit Ausnahme des Startmarks, des Befehlsworts und der Prüfsumme |
|
| 4 | Dn | Parameter | Siehe Tabelle 5 |
|
| 5 | D0 |
|
||
| 6 | Chk | XOR -Überprüfung | Mit Ausnahme des gültigen Byte sind alle anderen Bytes XORed |
|
Hauptregelungsstatus Beschreibung:
Tabelle 5 beschreibt das vom Entfernungsmesser an den Master Controller gesendete Datenwort
Tabelle 5 beschreibt das vom Entfernungsmesser an den Master Controller gesendete Datenwort
| Bestellnummer | CW | Funktion | Daten Byte | Anmerkungen | Gesamtlänge |
| 1 | 0x00 | aufhören | D1 = 00 (H) D0 = 00 (H) |
|
Sechs Bytes |
| 2 | 0x03 | Selbstprüfung | D8 ~ d1 | D8-D7: -5 V-Spannung, Einheit 0.01V.D6-D5: Blindfleckwert, Einheit 1MD4: APD-Hochspannungswert, Einheit V; D3: Zeichenstyp, Angabe der APD-Temperatur, Einheit: Grad Celsius; D2-D1: +5 V-Spannung, Einheit 0,01V | 12 Bytes |
| 3 | 0x04 | Entfernung zur nächsten Zugangseinstellung, Einheit m | D1 D0 | Daten beschreiben den nächsten Abstandswert, Einheit 1M; Start hoch und enden niedrig | Sechs Bytes |
| 4 | 0x06 | Kumulative Anzahl von Lichtausgabebestnungen | D3 ~ D0 | Daten drücken die Häufigkeit aus, mit der Licht aus emittiert wird, 4 Bytes, mit dem hohen Byte zuerst | Sieben Bytes |
| 5 | 0x11 | APD -Kraft ist eingeschaltet | D1 = 00 (H) D0 = 00 (H) | APD -Kraft ist eingeschaltet | Sechs Bytes |
| 6 | 0x12 | APD -Ausschalten | D1 = 00 (H) D0 = 00 (H) | APD -Ausschalten | Sechs Bytes |
| 7 | 0xed | Überstunden arbeiten | 0x00 0x00 | Der Laser steht im Laserarbeitsschutz und kann nicht gemessen werden. | Sechs Bytes |
| 8 | 0xee | Effektivitätsfehler | 0x00 0x00 |
|
Sechs Bytes |
| 9 | 0xef | Seriennort -Kommunikationszeitüberschreitung | 0x00 0x00 |
|
Sechs Bytes |
| 10 | 0x01 | Einzelbereichsmessung (Einzelziel, Null für das zweite und dritte Ziel, Null für das dritte Ziel am Anfang und am Ende des Ziels) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 erster Zielabstand (Einheit 0,1 m) D5-D3-Abstand zum zweiten Ziel (Einheit: 0,1 m) D2-D0 Dritter Zielabstand (Einheit 0,1 m) 3. Die Ziele von nahezu Fard9 (Bit7-Bit0) Flag-Byte: D9 ist das 7. Bit, um die Hauptwelle anzuzeigen; 1: Es gibt eine Hauptwelle, 0: keine Hauptwelle. D9 ist die 6. Position, die Echo anzeigt; 1: Es gibt Echo, 0: nein echod9 Die fünfte Position zeigt den Laserstatus an. 1: Normaler Laser, 0: Laser Faustd9 ist das vierte Bit des Zeitlimits, 1: Normal, 0: Timeoutd9 ist an der 3. Position ungültig (auf 1 gesetzt); d9 Die zweite Position zeigt den APD -Zustand an; 1: Normal, 0: Errord9 ist die erste Position, die angibt, ob es ein vorheriges Ziel gibt; 1: Es gibt ein vorheriges Ziel, 0: kein vorheriges Ziel (Ziel im blinden Bereich) .D9 Das 0. Bit zeigt an, ob es ein nachfolgendes Ziel gibt; 1: Es gibt ein nachfolgendes Ziel, 0: kein nachfolgendes Ziel (das Ziel nach dem Hauptziel ist das nachfolgende Ziel) | 14 Bytes |
| 11 | 0x02 | Kontinuierliches Ranging (Einzelziel, Null für das zweite und dritte Ziel, Null für das dritte Ziel am Anfang und am Ende des Ziels) | D9 D8 D7 D6D5 D4D2 D1 D0 | D8-D6 erster Zielabstand (Einheit 0,1 m) D5-D3-Abstand zum zweiten Ziel (Einheit: 0,1 m) D2-D0 Dritter Zielabstand (Einheit 0,1 m) 3. Die Ziele von nahezu Fard9 (Bit7-Bit0) Flag-Byte: D9 ist das 7. Bit, um die Hauptwelle anzuzeigen; 1: Es gibt eine Hauptwelle, 0: keine Hauptwelle. D9 ist die 6. Position, die Echo anzeigt; 1: Es gibt Echo, 0: Nein Echod9 Das 5. Bit zeigt den Laserstatus an. 1: Normaler Laser, 0: Laser Faustd9 ist das vierte Bit des Zeitlimits, 1: Normal, 0: Timeoutd9 ist an der 3. Position ungültig (auf 1 gesetzt); d9 Die zweite Position zeigt den APD -Zustand an; 1: Normal, 0: Errord9 ist die erste Position, die angibt, ob es ein vorheriges Ziel gibt; 1: Es gibt ein vorheriges Ziel, 0: kein vorheriges Ziel (Ziel im blinden Bereich) .D9 Das 0. Bit zeigt an, ob es ein nachfolgendes Ziel gibt; 1: Es gibt ein nachfolgendes Ziel, 0: kein nachfolgendes Ziel (das Ziel nach dem Hauptziel ist das nachfolgende Ziel) | 14 Bytes |
| 12 | 0xEB | Zahlenabfrage | D17 …… D0 | D17 D16 D15 D14 D13 D12 Ganzmaschinenmodell coded11D10 Produktnummerd9 D6 Software VersionD5 D4 APD Numberd3 D2 Laser Numberversion D1 der FPGA | 22 Bytes |
| HINWEIS: ① undefined Data Byte/Bit, Standard ist 0; | |||||
Hot-Tags: 2mrad 1 km Laser -Entfernungsmodul für Anti -Drohnen -Stem, Hersteller, Lieferanten, Fabrik, China, Herstellung in China, maßgeschneidert, hohe Qualität
Verwandte Kategorie
905-nm-Laser-Entfernungsmesser-Modul
1535-nm-Laser-Entfernungsmesser-Modul
1570 nm Laser-Entfernungsmesser-Modul
1,54um Laser -Entfernungsmodul
1064nm Laserzielerheber
Anti -Drohnen -Ststem -Modul
Ranging-Lidar-Modul
Anfrage absenden
Bitte zögern Sie nicht, Ihre Anfrage im untenstehenden Formular zu stellen. Wir werden Ihnen innerhalb von 24 Stunden antworten.