Heim
>
Produkte > Laser-Entfernungsmesser-Modul > Anti -Drohnen -Ststem -Modul > 2mrad 2km Laser-Entfernungsmessermodul für Anti-Drohnen-System
Produkte
- Laser-Entfernungsmesser-Modul
- Laser
- Faseroptik-Kreisel
- MWIR-Kamera
- Laser-Gyroskop
- Wärmebildtechnik
- Laser-Entfernungsmesser-Fernglas
- Kamera
- SWIR-Kameras
- గోడేరే డబుల్-లేయర్ శాడిల్ బ్యాగ్, ఈ అసలైన లెదర్ మహిళల క్రాస్బాడీ బ్యాగ్, ఎటర్నల్ క్లాసిక్, పర్ఫెక్ట్గా బ్లెండింగ్ స్టైల్ మరియు ఫంక్షనాలిటీ. అధునాతనతను వెదజల్లే ఎరుపు రంగు లెదర్ క్రాస్బాడీ బ్యాగ్ని కోరుకునే ఫ్యాషన్-ఫార్వర్డ్ మహిళలకు ఇది సరైన ఎంపిక. ఈ లెదర్ వాలెట్ విశాలమైన ఇంటీరియర్ స్పేస్ మరియు స్టైలిష్ డిజైన్ను కలిగి ఉంది, ఇది అధిక-నాణ్యత గల మహిళల తోలు హ్యాండ్బ్యాగ్లను మెచ్చుకునే వారికి తప్పనిసరిగా ఉండాలి. డబుల్ లేయర్ జీను బ్యాగ్
- AESA-Radar
- Elektronischer Kompass
- Laserverteidigung
- Drahtlose Videoübertragungsverbindung





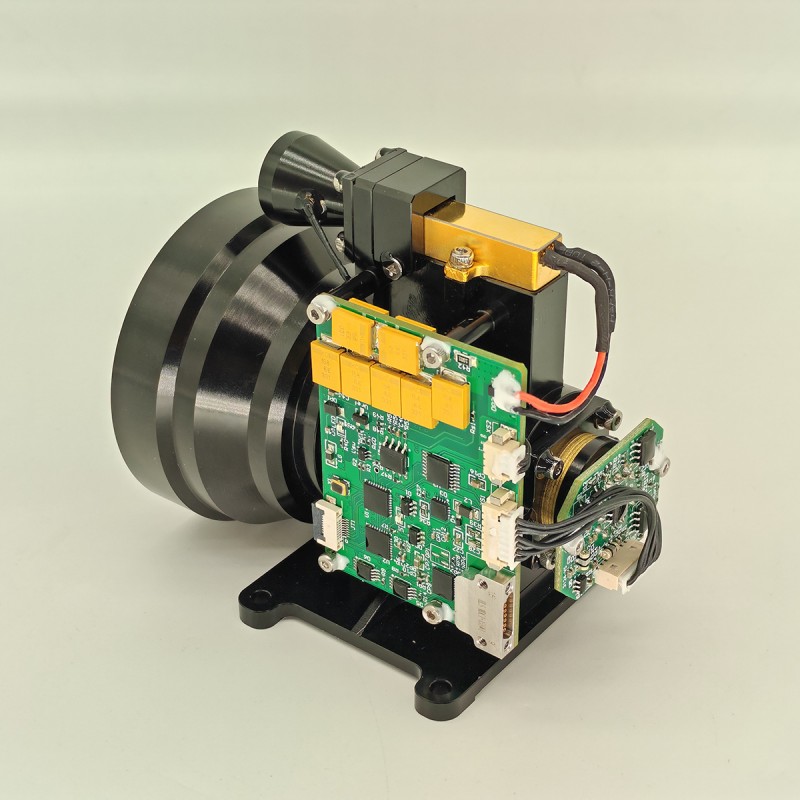


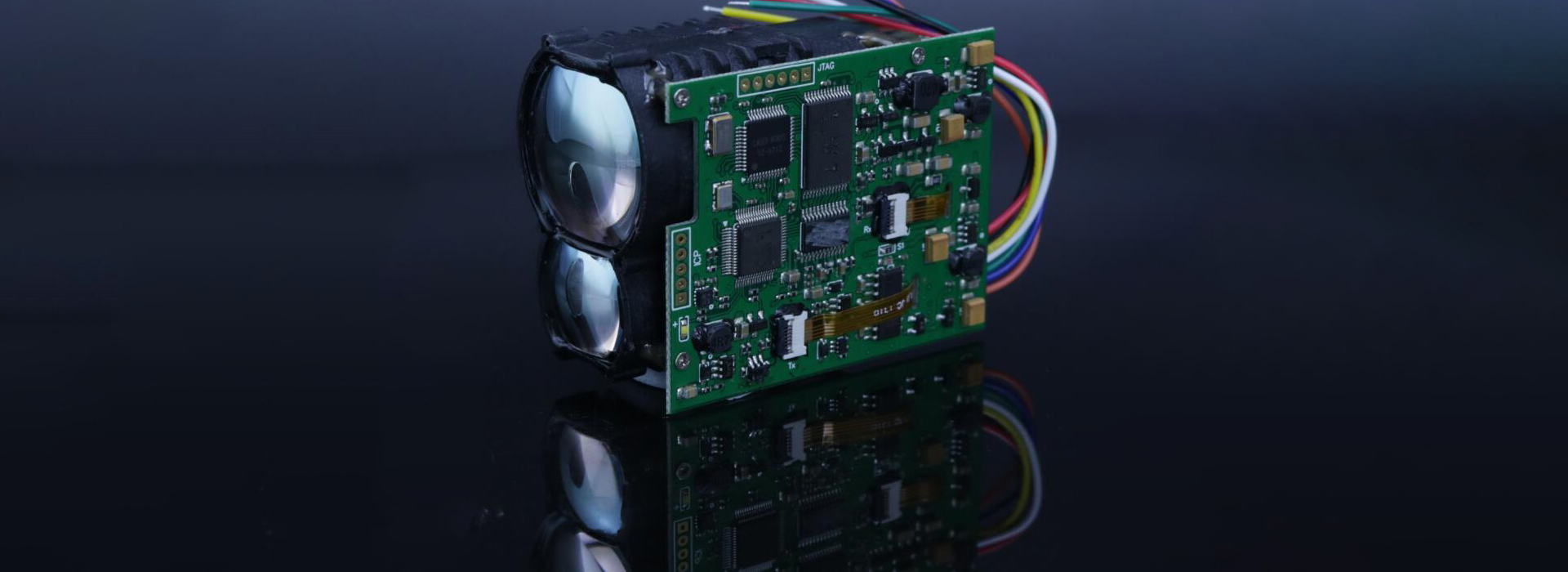
2mrad 2km Laser-Entfernungsmessermodul für Anti-Drohnen-System
Das kompakte Laser-Entfernungsmessermodul STA-WR2000X eignet sich hervorragend für die Integration in die Luftverteidigungssysteme des Heeres und der Marine. Das Entfernungsmessmodul verwendet den fortschrittlichsten diodengepumpten Erbium-Glaslaser, der eine hohe Verfügbarkeit und niedrige Wartungskosten aufweist. Sein Divergenzwinkel von 2 mrad kann UAVs mit einem Querschnitt von 0,1 ㎡ bis zu 2000 Metern messen, was es zu einem wichtigen Bestandteil von Anti-Drohnen-Systemen macht.
Anfrage absenden
Produktbeschreibung
1)Einfache Bereichswahl und kontinuierliche Bereichswahl;
2) Reagieren auf Laserentfernungsbefehle und jederzeitiges Stoppen der Entfernungsmessung entsprechend dem Stoppbefehl;
3) Gibt Entfernungsdaten und Statusinformationen einmal pro Impuls während der Entfernungsmessung aus;
4) Es kann die kumulierte Anzahl der gesendeten Laserimpulse melden (kein Leistungsverlust);
5) Entfernungsauswahl vor und nach der Zielanzeige;
6) Selbsttestfunktion.
2) Reagieren auf Laserentfernungsbefehle und jederzeitiges Stoppen der Entfernungsmessung entsprechend dem Stoppbefehl;
3) Gibt Entfernungsdaten und Statusinformationen einmal pro Impuls während der Entfernungsmessung aus;
4) Es kann die kumulierte Anzahl der gesendeten Laserimpulse melden (kein Leistungsverlust);
5) Entfernungsauswahl vor und nach der Zielanzeige;
6) Selbsttestfunktion.
| Optischer Index | |
| Wellenlänge | 1535 nm ± 5 nm |
| Laserdivergenzwinkel | ≤2mrad |
| Effektive Empfangsöffnung | 56mm |
| Bereichsfrequenz | Einzeln, 1~10 Hz einstellbar |
| Reichweite | Sichtweite ≥ 12 km, Zielreflexion ≥ 0,3, Luftfeuchtigkeit ≤ 80 %, UAV-Entfernungsentfernung (0,25 m × 0,25 m) ≥ 2 km |
| Entfernungsgenauigkeit | ≤±1m (RMS) |
| Elektrische Anzeigen | ≥98 % |
| Fehlalarmrate | ≤1 % |
| Mindestmessbereich | ≤50m |
| Stabilität der Laserachse | ≤0,05 mrad |
| Die optische Achse verläuft parallel zur Einbaureferenz | ≤0,3 mrad |
| Mechanische Indikatoren | |
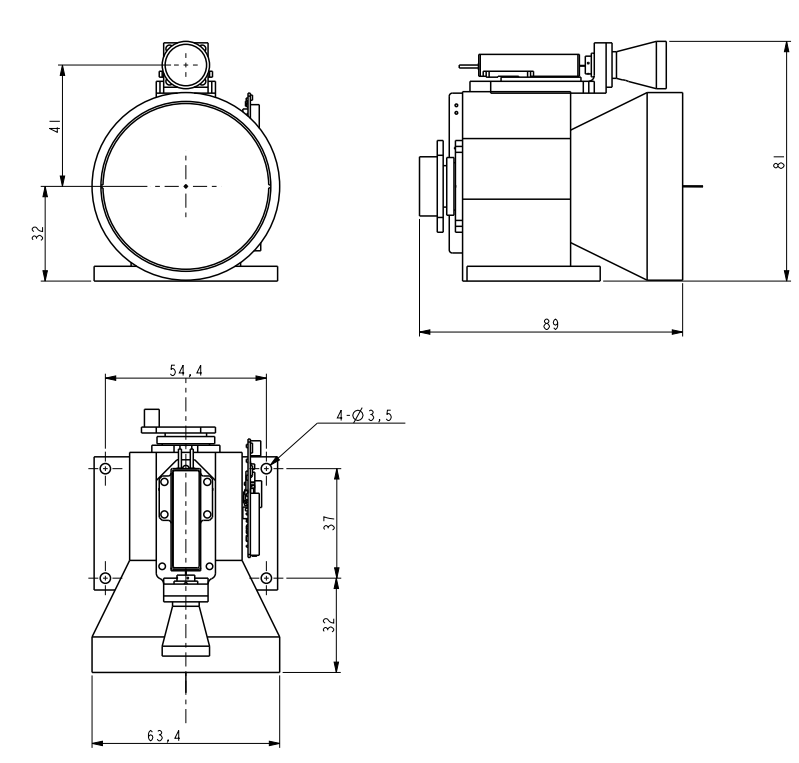
| Größe | ≤90×63×82mm |
| Gewicht | ≤300g |
| Elektrische Anzeigen | |
| Strom liefern | DC9V ~ 32V |
| Verlustleistung | Betrieb mit weniger als 3 W bei 10 Hz, Spitzenstromverbrauch weniger als 5 W |
| Schnittstelle | RS422-Schnittstelle, 115200 bps |
| Steuerschnittstelle einschalten | Wenn der Sicherheitsabstand erreicht ist, schalten Sie es ein und verwenden Sie es. oder im Energiesparmodus, um den Betriebszustand zu steuern |
| Schutz der Leiterplatte | Nachdem der Entwurf und das Debuggen der Leiterplatte abgeschlossen sind, muss die Anti-Schock-Farbe aufgetragen und die „Drei-Schutz“-Behandlung durchgeführt werden |
| Umweltverträglichkeit | |
| Arbeitstemperatur | -40℃-65℃ |
| Lagertemperatur | -55℃-70℃ |
| Vibrieren | GJB150.16 A-2009 „Umwelttestmethoden des Militärausrüstungslabors – Vibrationstest“ |
| Peitsche | GJB150.18 A-2009 „Umwelttestmethode des Militärausrüstungslabors – Auswirkungstest“ |
Notiz:
D8-D6 erste Zielentfernung (Einheit: 0,1 m)D5-D3 Entfernung zum zweiten Ziel (Einheit: 0,1 m)D2-D0 dritte Zielentfernung (Einheit: 0,1 m)3. Ziele sind von nah nach fernD9 (bit7-bit0) Flag-Byte: D9 ist das 7. Bit, das die Hauptwelle anzeigt; 1: es gibt eine Hauptwelle, 0: keine Hauptwelle. D9 ist die 6. Position, die das Echo anzeigt; 1: Echo vorhanden, 0: kein EchoD9 Die fünfte Position zeigt den Laserstatus an; 1: normaler Laser, 0: LaserfehlerD9 ist das vierte Bit des Timeout-Flags, 1: normal, 0: TimeoutD9 ist an der 3. Position ungültig (auf 1 gesetzt); D9 Die zweite Position gibt den APD-Status an; 1: normal, 0: FehlerD9 ist die erste Position, die angibt, ob ein vorheriges Ziel vorhanden ist. 1: es gibt ein vorheriges Ziel, 0: kein vorheriges Ziel (Ziel im toten Bereich).D9 Das 0. Bit zeigt an, ob es ein nachfolgendes Ziel gibt; 1: es gibt ein Folgeziel, 0: kein Folgeziel (das Ziel nach dem Hauptziel ist das Folgeziel)
2. Mindestreichweite: Schwankungen von 30 m bis 100 m, nach normalem Gebrauch wird eine Reichweite von 50 m empfohlen; Da die Laserenergie groß ist, kann die Verwendung im Nahbereich den Detektorchip verbrennen. Bitte bringen Sie daher beim Debuggen eine gute Spiegelabdeckung mit, um zu verhindern, dass der Detektorchip verbrennt.
D8-D6 erste Zielentfernung (Einheit: 0,1 m)D5-D3 Entfernung zum zweiten Ziel (Einheit: 0,1 m)D2-D0 dritte Zielentfernung (Einheit: 0,1 m)3. Ziele sind von nah nach fernD9 (bit7-bit0) Flag-Byte: D9 ist das 7. Bit, das die Hauptwelle anzeigt; 1: es gibt eine Hauptwelle, 0: keine Hauptwelle. D9 ist die 6. Position, die das Echo anzeigt; 1: Echo vorhanden, 0: kein EchoD9 Die fünfte Position zeigt den Laserstatus an; 1: normaler Laser, 0: LaserfehlerD9 ist das vierte Bit des Timeout-Flags, 1: normal, 0: TimeoutD9 ist an der 3. Position ungültig (auf 1 gesetzt); D9 Die zweite Position gibt den APD-Status an; 1: normal, 0: FehlerD9 ist die erste Position, die angibt, ob ein vorheriges Ziel vorhanden ist. 1: es gibt ein vorheriges Ziel, 0: kein vorheriges Ziel (Ziel im toten Bereich).D9 Das 0. Bit zeigt an, ob es ein nachfolgendes Ziel gibt; 1: es gibt ein Folgeziel, 0: kein Folgeziel (das Ziel nach dem Hauptziel ist das Folgeziel)
2. Mindestreichweite: Schwankungen von 30 m bis 100 m, nach normalem Gebrauch wird eine Reichweite von 50 m empfohlen; Da die Laserenergie groß ist, kann die Verwendung im Nahbereich den Detektorchip verbrennen. Bitte bringen Sie daher beim Debuggen eine gute Spiegelabdeckung mit, um zu verhindern, dass der Detektorchip verbrennt.
Mechanisches Strukturdiagramm
Externe Schnittstelle
| Stift | Definition | Funktion | Notizen |
| 1 | RX+ | RS422-Empfänger + | Blau |
| 2 | RX- | RS422-Empfänger - | Grün |
| 3 | TX- | RS422-Übertragung - | Lila |
| 4 | TX+ | RS422-Übertragung + | Gelb |
| 5 | GND | Kommunikationserdungskabel | Weiß |
| 6 | VEE | Stromversorgung + | Rot |
| 7 | GND | Stromversorgung - | Schwarz |
| 8 | PWR EN | / | Asche |
OEM/ODM 1-15 km Laser-Entfernungsmodul für Counter Unmanned Aerial Systems (C-UAS)
Kommunikationsprotokoll
1. Übertragungsprotokoll: asynchrone serielle Kommunikation;
2. Portrate: 115200;
3. Datenbits: 10 Bits: ein Startbit, 8 Datenbits, ein Stoppbit, ungültige Überprüfung;
4. Datenstruktur: Die Daten bestehen aus Header-Byte, Befehlsteil, Datenlänge, Parameterteil und Prüfbyte;
5. Kommunikationsmodus: Die Hauptsteuerung sendet Steuerbefehle an die Entfernungsmessmaschine, und die Entfernungsmessmaschine empfängt die Anweisungen und führt sie aus. Im Ranging-Zustand sendet das Ranging-Gerät Daten und Status des Ranging-Geräts gemäß dem Ranging-Zyklus an den oberen Computer zurück. Das Kommunikationsformat und der Befehlsinhalt sind in der folgenden Tabelle aufgeführt.
A) Hauptsteuersignale
2. Portrate: 115200;
3. Datenbits: 10 Bits: ein Startbit, 8 Datenbits, ein Stoppbit, ungültige Überprüfung;
4. Datenstruktur: Die Daten bestehen aus Header-Byte, Befehlsteil, Datenlänge, Parameterteil und Prüfbyte;
5. Kommunikationsmodus: Die Hauptsteuerung sendet Steuerbefehle an die Entfernungsmessmaschine, und die Entfernungsmessmaschine empfängt die Anweisungen und führt sie aus. Im Ranging-Zustand sendet das Ranging-Gerät Daten und Status des Ranging-Geräts gemäß dem Ranging-Zyklus an den oberen Computer zurück. Das Kommunikationsformat und der Befehlsinhalt sind in der folgenden Tabelle aufgeführt.
A) Hauptsteuersignale
Das Format der zu sendenden Nachricht ist wie folgt:
| STX0 | CMD | LEN | DATA1H | DATA1L | CHK |
Tabelle 2 Formatbeschreibung der gesendeten Nachricht
| Bestellnummer | Name | erklären | Code | Bemerkungen |
| 1 | STX0 | Nachrichtenstartflag | A5(H) |
|
| 2 | CMD | CW | Siehe Tabelle 3 |
|
| 3 | LEN | DL | Die Anzahl aller Bytes außer Startmarke, Befehlswort und Prüfsumme |
|
| 4 | DATEN | Parameter | Siehe Tabelle 3 |
|
| 5 | Ankunft |
|
||
| 6 | CHK | XOR-Verifizierung | Bis auf das gültige Byte werden alle anderen Bytes XOR-verknüpft |
|
Der Befehl wird wie folgt beschrieben:
Tabelle 3 Beschreibung der vom Master an die Entfernungsmessmaschine gesendeten Befehle und Datenwörter
Tabelle 3 Beschreibung der vom Master an die Entfernungsmessmaschine gesendeten Befehle und Datenwörter
| Bestellnummer | CW | Funktion | Datenbyte | Bemerkungen | Länge | Beispielcode |
| 1 | 0x00 | aufhören | DATAH=00(H)DATAL=00(H) | Der Entfernungsmesser stoppt die Messung | Sechs Bytes | A5 00 02 00 00 A7 |
| 2 | 0x01 | Einzelbereich | DATAH=00(H)DATAL=00(H) |
|
Sechs Bytes | A5 01 02 00 00 A6 |
| 3 | 0x02 | Kontinuierliche Reichweite | DATAH=XX(H)DATAL=YY(H) | DATA beschreibt den Bereichszeitraum in ms | Sechs Bytes | A5 02 02 03 E8 4E (1-Hz-Bereich) |
| 4 | 0x03 | Selbstkontrolle | DATAH=00(H)DATAL=00(H) |
|
Sechs Bytes | A5 03 02 00 00 A4 |
| 5 | 0x04 | Stellen Sie den nächstgelegenen Abstand zur Auswahl ein | DATAH=XX(H)DATAL=YY(H) | DATA beschreibt den Blindzonenwert, Einheit 1m | Sechs Bytes | A5 04 02 00 64 C7 (100 m ist die kürzeste Entfernung) |
| 6 | 0x06 | Kumulierte Anzahl von Lichtleistungsabfragen | DATAH=00(H)DATAL=00(H) | Kumulierte Anzahl von Lichtleistungsabfragen | Sechs Bytes | A5 06 02 00 00 A1 |
| 7 | 0x11 | APD-Stromversorgung ist eingeschaltet | DATAH=00(H)DATAL=00(H) |
|
Sechs Bytes | A5 11 02 00 00 B6 |
| 8 | 0x12 | APD-Stromversorgung ist ausgeschaltet | DATAH=00(H)DATAL=00(H) |
|
Sechs Bytes | A5 12 02 00 00 B5 |
| 9 | 0xEB | Nummernabfrage | DATAH=00(H)DATAL=00(H) | Nummernabfrage | Sechs Bytes | A5 EB 02 00 00 4C |
a) Die Hauptsteuerung erhält das Format
Das Format der empfangenen Nachricht ist wie folgt:
Das Format der empfangenen Nachricht ist wie folgt:
| STX0 | CMD | LEN | DATEN | DATUM0 | CHK |
Tabelle 4 Formatbeschreibung der empfangenen Nachrichten
| Bestellnummer | Name | erklären | Code | Bemerkungen |
| 1 | STX0 | RS422-Übertragung + | A5(H) |
|
| 2 | CMD_JG | Datenbefehlswort | Siehe Tabelle 5 |
|
| 3 | LEN | DL | Die Anzahl aller Bytes außer Startmarke, Befehlswort und Prüfsumme |
|
| 4 | Dn | Parameter | Siehe Tabelle 5 |
|
| 5 | D0 |
|
||
| 6 | CHK | XOR-Verifizierung | Bis auf das gültige Byte werden alle anderen Bytes XOR-verknüpft |
|
Beschreibung des Empfangsstatus der Hauptsteuerung:
Tabelle 5 beschreibt das vom Entfernungsmesser an den Master-Controller gesendete Datenwort
Tabelle 5 beschreibt das vom Entfernungsmesser an den Master-Controller gesendete Datenwort
| Bestellnummer | CW | Funktion | Datenbyte | Bemerkungen | Gesamtlänge |
| 1 | 0x00 | aufhören | D1=00(H)D0=00(H) |
|
Sechs Bytes |
| 2 | 0x03 | Selbstkontrolle | D8~D1 | D8-D7: -5V-Spannung, Einheit 0,01V.D6-D5: Blinder-Winkel-Wert, Einheit 1mD4: APD-Hochspannungswert, Einheit V;D3: Zeichentyp, der die APD-Temperatur anzeigt, Einheit: Grad Celsius;D2-D1: +5V-Spannung, Einheit 0,01V | 12 Byte |
| 3 | 0x04 | Entfernung zur nächstgelegenen Zugangseinstellung, Einheit m | D1 D0 | DATEN beschreiben den nächstgelegenen Entfernungswert, Einheit 1 m; Anfang hoch und Ende niedrig | Sechs Bytes |
| 4 | 0x06 | Kumulierte Anzahl von Lichtleistungsabfragen | D3~D0 | Betrieb mit weniger als 3 W bei 10 Hz, Spitzenstromverbrauch weniger als 5 W | Sieben Bytes |
| 5 | 0x11 | APD-Stromversorgung ist eingeschaltet | D1=00(H)D0=00(H) | APD-Stromversorgung ist eingeschaltet | Sechs Bytes |
| 6 | 0x12 | APD-Ausschaltung | D1=00(H)D0=00(H) | APD-Stromversorgung ist ausgeschaltet | Sechs Bytes |
| 7 | 0xED | Überstunden machen | 0x00 0x00 | Der Laser steht unter Laserschutz und kann nicht gemessen werden. | Sechs Bytes |
| 8 | 0xEE | Wirksamkeitsfehler | 0x00 0x00 |
|
Sechs Bytes |
| 9 | 0XEF | Zeitüberschreitung bei der Kommunikation über die serielle Schnittstelle | 0x00 0x00 |
|
Sechs Bytes |
| 10 | 0x01 | Einzelentfernungsmessung (einzelnes Ziel, Null für das zweite und dritte Ziel, Null für das dritte Ziel am Anfang und Ende des Ziels) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 erste Zielentfernung (Einheit: 0,1 m)D5-D3 Entfernung zum zweiten Ziel (Einheit: 0,1 m)D2-D0 dritte Zielentfernung (Einheit: 0,1 m)3. Ziele sind von nah nach fernD9 (bit7-bit0) Flag-Byte: D9 ist die 7. Position, die die Hauptwelle anzeigt; 1: es gibt eine Hauptwelle, 0: keine Hauptwelle. D9 ist die 6. Position, die das Echo anzeigt; 1: Echo vorhanden, 0: kein EchoD9 Die fünfte Position zeigt den Laserstatus an; 1: normaler Laser, 0: LaserfehlerD9 ist das vierte Bit des Timeout-Flags, 1: normal, 0: TimeoutD9 ist an der 3. Position ungültig (auf 1 gesetzt); D9 Die zweite Position zeigt den APD-Status an; 1: normal, 0: FehlerD9 ist die erste Position, die angibt, ob ein vorheriges Ziel vorhanden ist. 1: es gibt ein vorheriges Ziel, 0: kein vorheriges Ziel (Ziel im toten Bereich).D9 Das 0. Bit zeigt an, ob es ein nachfolgendes Ziel gibt; 1: es gibt ein Folgeziel, 0: kein Folgeziel (das Ziel nach dem Hauptziel ist das Folgeziel) | 14 Byte |
| 11 | 0x02 | Kontinuierliche Entfernungsmessung (einzelnes Ziel, Null für das zweite und dritte Ziel, Null für das dritte Ziel am Anfang und Ende des Ziels) | D9 D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 erste Zielentfernung (Einheit: 0,1 m)D5-D3 Entfernung zum zweiten Ziel (Einheit: 0,1 m)D2-D0 dritte Zielentfernung (Einheit: 0,1 m)3. Ziele sind von nah nach fernD9 (bit7-bit0) Flag-Byte: D9 ist das 7. Bit, das die Hauptwelle anzeigt; 1: es gibt eine Hauptwelle, 0: keine Hauptwelle. D9 ist die 6. Position, die das Echo anzeigt; 1: Echo vorhanden, 0: kein EchoD9 Die fünfte Position zeigt den Laserstatus an; 1: normaler Laser, 0: LaserfehlerD9 ist das vierte Bit des Timeout-Flags, 1: normal, 0: TimeoutD9 ist an der 3. Position ungültig (auf 1 gesetzt); D9 Die zweite Position gibt den APD-Status an; 1: normal, 0: FehlerD9 ist die erste Position, die angibt, ob ein vorheriges Ziel vorhanden ist; 1: es gibt ein vorheriges Ziel, 0: kein vorheriges Ziel (Ziel im toten Bereich).D9 Das 0. Bit zeigt an, ob es ein nachfolgendes Ziel gibt; 1: es gibt ein Folgeziel, 0: kein Folgeziel (das Ziel nach dem Hauptziel ist das Folgeziel) | 14 Byte |
| 12 | 0xEB | Nummernabfrage | D17……D0 | D17 D16 D15 D14 D13 D12 Modellcode der gesamten MaschineD11D10 ProduktnummerD9 D6 SoftwareversionD5 D4 APD-NummerD3 D2 LasernummerVersion D1 des FPGA | 22 Byte |
| Hinweis: ① Undefiniertes Datenbyte/Bit, Standard ist 0; | |||||
Hot-Tags: 2mrad 2km Laser-Entfernungsmessermodul für Anti-Drohnen-System, Hersteller, Lieferanten, Fabrik, China, hergestellt in China, kundenspezifisch, hohe Qualität
Verwandte Kategorie
905-nm-Laser-Entfernungsmesser-Modul
1535-nm-Laser-Entfernungsmesser-Modul
1570 nm Laser-Entfernungsmesser-Modul
1,54um Laser -Entfernungsmodul
1064nm Laserzielerheber
Anti -Drohnen -Ststem -Modul
Ranging-Lidar-Modul
Anfrage absenden
Bitte zögern Sie nicht, Ihre Anfrage im untenstehenden Formular zu stellen. Wir werden Ihnen innerhalb von 24 Stunden antworten.