Heim
>
Produkte > Laser-Entfernungsmesser-Modul > 1064nm Laserzielerheber > 45MJ Laser Target Designator (LTD) mit LRF
Produkte
- Laser-Entfernungsmesser-Modul
- Laser
- Faseroptik-Kreisel
- MWIR-Kamera
- Laser-Gyroskop
- Wärmebildtechnik
- Laser-Entfernungsmesser-Fernglas
- Kamera
- SWIR-Kameras
- గోడేరే డబుల్-లేయర్ శాడిల్ బ్యాగ్, ఈ అసలైన లెదర్ మహిళల క్రాస్బాడీ బ్యాగ్, ఎటర్నల్ క్లాసిక్, పర్ఫెక్ట్గా బ్లెండింగ్ స్టైల్ మరియు ఫంక్షనాలిటీ. అధునాతనతను వెదజల్లే ఎరుపు రంగు లెదర్ క్రాస్బాడీ బ్యాగ్ని కోరుకునే ఫ్యాషన్-ఫార్వర్డ్ మహిళలకు ఇది సరైన ఎంపిక. ఈ లెదర్ వాలెట్ విశాలమైన ఇంటీరియర్ స్పేస్ మరియు స్టైలిష్ డిజైన్ను కలిగి ఉంది, ఇది అధిక-నాణ్యత గల మహిళల తోలు హ్యాండ్బ్యాగ్లను మెచ్చుకునే వారికి తప్పనిసరిగా ఉండాలి. డబుల్ లేయర్ జీను బ్యాగ్
- AESA-Radar
- Elektronischer Kompass
- Laserverteidigung
- Drahtlose Videoübertragungsverbindung




 mit LRF")
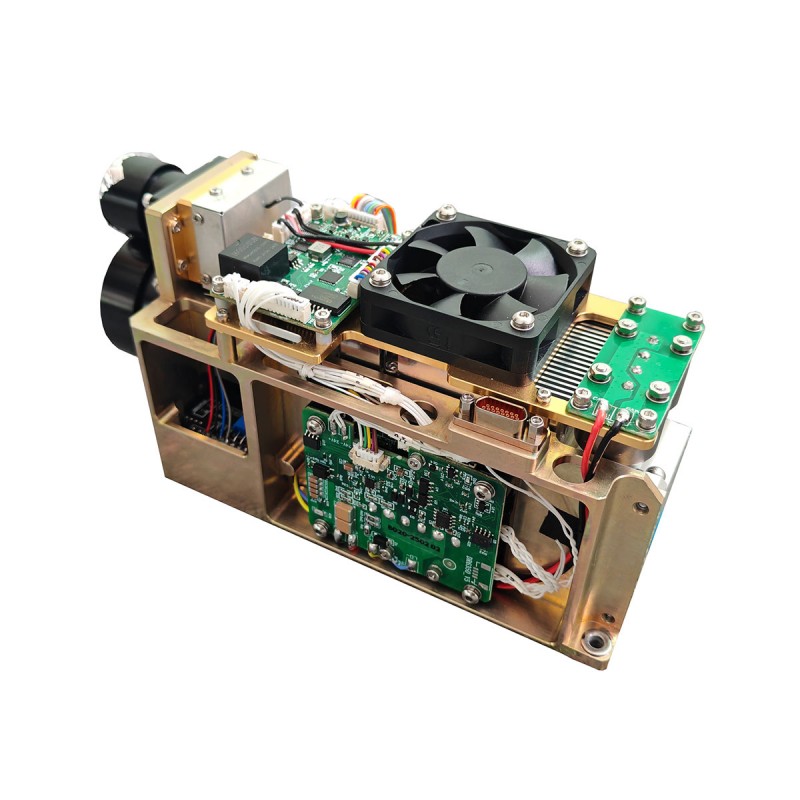
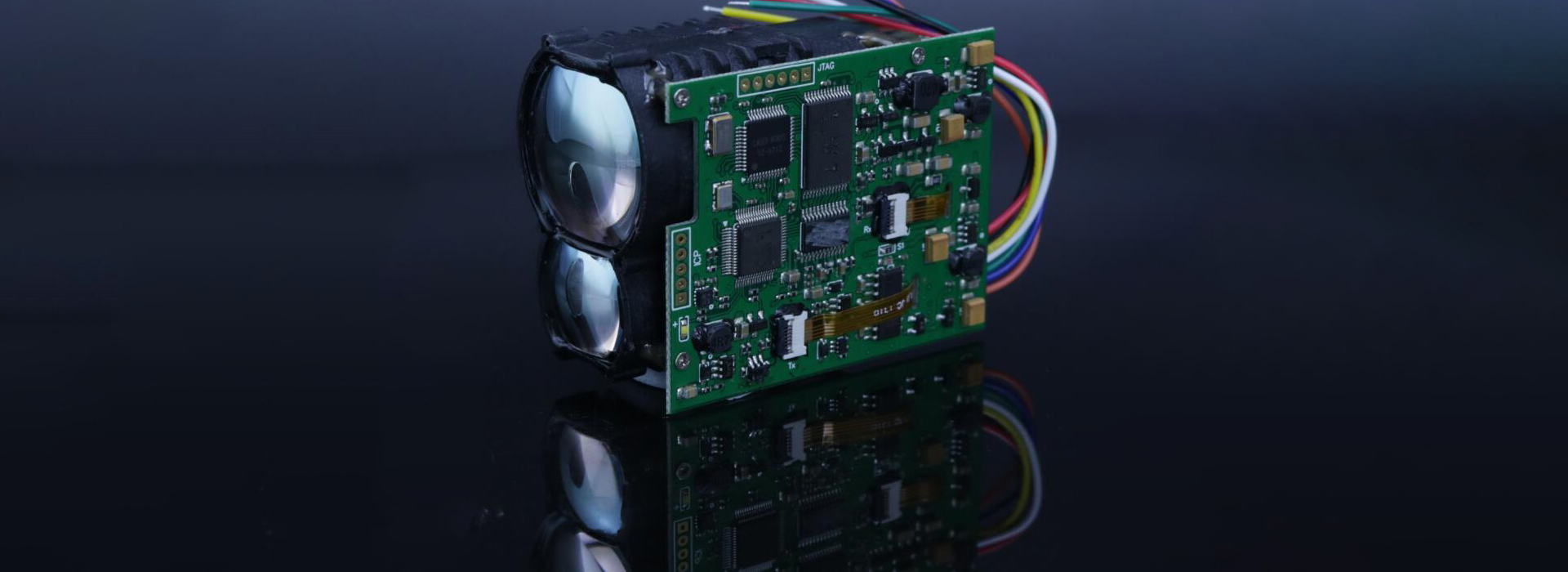
45MJ Laser Target Designator (LTD) mit LRF
STA-B45M ist ein militärischer 45MJ-Laserziel-Ziel-Designer, der eine entscheidende Rolle bei Präzisionszielsystemen spielt, die in der Lage sind, genaue Anleitungen für die intelligente Munition zu liefern. Durch ein fortschrittliches optisches System markiert es das Ziel mit einem Laserstrahl und stellt sicher, dass präzisionsgeführte Waffen das Ziel mit extrem hoher Genauigkeit und Effizienz zerstören können.
Anfrage absenden
Produktbeschreibung
Produktmerkmale
Leicht und miniaturisiert
Umweltanpassungsfähigkeit: -40 ℃ ~ 60 ℃ breite Temperaturanpassungsfähigkeit
Umweltanpassungsfähigkeit: -40 ℃ ~ 60 ℃ breite Temperaturanpassungsfähigkeit
Kernanzeigeparameter
Funktion
A) Es hat die Funktion, den Bestrahlungszyklus festzulegen und kann die Laserbestrahlung gemäß dem festgelegten Zyklus durchführen.
b) ausgestattet mit Laser -Einzel- und wiederholten Rangierungsfunktionen.
c) ausgestattet mit Multi-Target-Sendungsfunktion.
D) Ausgestattet mit der Temperaturausgangsfunktion für die Kernkomponenten der Kamera.
e) Ausgestattet mit Überhitzungsschutzfunktion für das Messgerät.
f) Ausgestattet mit der Funktion des Ausgabestatusinformationen des Beleuchtungsgeräts.
A) Es hat die Funktion, den Bestrahlungszyklus festzulegen und kann die Laserbestrahlung gemäß dem festgelegten Zyklus durchführen.
b) ausgestattet mit Laser -Einzel- und wiederholten Rangierungsfunktionen.
c) ausgestattet mit Multi-Target-Sendungsfunktion.
D) Ausgestattet mit der Temperaturausgangsfunktion für die Kernkomponenten der Kamera.
e) Ausgestattet mit Überhitzungsschutzfunktion für das Messgerät.
f) Ausgestattet mit der Funktion des Ausgabestatusinformationen des Beleuchtungsgeräts.
Technische Parameter
| Modell | STA-B6445M |
| Laserwellenlänge | 1.06um (unter Verwendung von ND: YAG -Kristall, Konstruktionsauswahlgarantie) |
| Laser average energy | ≥ 45 mJ (Energieschwankungen ≤ ± 8%); |
| Laserdivergenzwinkel | 0,5mrad |
| optische Laser -Emissions -Stabilität | ≤ 0,05mrad |
| Die optische Laseremissionsachse und die Installation der Basisebene sind nicht parallel | ≤ 3 '(Entwurfsgarantie); |
| Laserpulsbreite | 10ns ~ 22ns |
| Maximalbereich | Sichtbarkeit ≥ 12 km, maximaler Bereich zur Messung der NATO -Ziele ≥ 6 km; |
| Mini reicht | 100 m |
| Ranglastfrequenz | 1 Hz/5Hz/Single |
| Ranggenauigkeit | ≤ ± 2 m (RMS) |
| Ranggenauigkeit | ≥ 98% |
| Entfernungsauflösung | ≤ 50 m |
| Kontinuierliche Rangzeitzeit | 5 min (5Hz: kontinuierliche Arbeit 5 min, Rest ≤ 3 min, kann weiterhin Bereiche). |
| Maximale Bestrahlungsabstand | ≥ 5 km |
| Mindestbestrahlungsabstand | ≤ 500 m (mit der Systembewertung) |
| Kontinuierlicher Bestrahlungszyklus | 8, jeder Zyklus dauert 25 Sekunden, mit 15S -Intervall; Nach 8 Zyklen rastintervall ≤ 20 min; |
| Lasercodezeitraum (durch Kommunikationsprotokoll festgelegt) | Einstellungsbereich 40 ms ~ 100 ms |
| Laser -Codierungs -Timinggenauigkeit | ≤ ± 2 μs |
| Laser-Startzeit | ≤ 3 min |
| Extra-Code-Synchronisationsfunktion | Ja |
| Arbeitstemperatur: | -40 ~+60 ℃ |
| Lagertemperatur | -50 ~+70 ℃ |
| Gewicht | ≤ 580 g |
| Modul an Sie | 138x75x50mm |
| Mit Multi-Target-Messfunktion und Rückgabe von drei Multi-Ziel-Wert mit der Distanz-Selektiv-Pass-Funktion. | |
Vorbereitung für den Gebrauch
Überprüfen Sie, ob die Stromversorgungsspannung zwischen 18 V und 32 V liegt. Wenn die Spannung zu niedrig ist (weniger als 18 V), kann der Entfernungsmesser nicht korrekt kommunizieren oder „kein Laserausgang“ angibt, und wenn die Spannung zu hoch ist (mehr als 32 V), kann der gesamte Beleuchtungsstrom dauerhaft beschädigt werden. Stellen Sie sicher, dass der Nennleistungstrom des Stromversorgungssystems größer als 6a ist. Wenn er geringer ist als dieser Wert, gibt es möglicherweise keinen Laser während des Betriebs. Stellen Sie sicher, dass die Polarität der Stromversorgung korrekt angeschlossen ist. Es besteht das Risiko einer Schädigung der Ausrüstung, wenn die Polarität umgekehrt ist. Siehe Anhang A für Definitionen von Stromversorgungsstücken.
Vorsichtsmaßnahmen für den Gebrauch
A) Der von diesem Entfernungsmesser emittierte Laser ist ein 1,06 uM nicht eye-sicherer Wellenlänge-Laser und vermeiden Sie bei Verwendung direkter Laserlicht in die Augen.
b) Wenn Sie die Parallelität der optischen Achse einstellen, blockieren Sie die Empfangslinse, da sonst der Detektor aufgrund des starken Echos dauerhaft beschädigt wird.
c) Dieses Entfernungsmessermodul ist nicht leitend. Verwenden Sie die relative Luftfeuchtigkeit von der Umgebung weniger als 80%und stellen Sie sicher, dass die Verwendung von Umweltsauberkeit und Hygiene, um den Laser nicht zu beschädigen.
D) Der Bereich des Entfernungsmessers hängt mit der atmosphärischen Sichtbarkeit zusammen und die Art des Ziels, bei Nebel, Regen, Wind und Sand, wird das Reichweite verringern. Ziele wie grüne Blattcluster, weiße Wände und freiliegender Kalkstein haben ein besseres Reflexionsvermögen und können den Bereich erhöhen. Darüber hinaus verringert eine Zunahme der Neigung des Ziels zum Laserstrahl den Bereich.
e) Es ist strengstens untersagt, den Laserstrahl bei stark reflektierenden Zielen wie Glas- und weißer Wände innerhalb von 100 Metern zu feuern, um starke Echos zu vermeiden, was den APD -Detektor schädigen kann.
f) Es ist strengstens untersagt, das Kabel abzuziehen oder zu schließen, während es mit Energie versorgt wird.
g) Stellen Sie sicher, dass die Stromversorgung korrekt angeschlossen ist, andernfalls führt sie zu dauerhaften Beschädigungen des Geräts.
b) Wenn Sie die Parallelität der optischen Achse einstellen, blockieren Sie die Empfangslinse, da sonst der Detektor aufgrund des starken Echos dauerhaft beschädigt wird.
c) Dieses Entfernungsmessermodul ist nicht leitend. Verwenden Sie die relative Luftfeuchtigkeit von der Umgebung weniger als 80%und stellen Sie sicher, dass die Verwendung von Umweltsauberkeit und Hygiene, um den Laser nicht zu beschädigen.
D) Der Bereich des Entfernungsmessers hängt mit der atmosphärischen Sichtbarkeit zusammen und die Art des Ziels, bei Nebel, Regen, Wind und Sand, wird das Reichweite verringern. Ziele wie grüne Blattcluster, weiße Wände und freiliegender Kalkstein haben ein besseres Reflexionsvermögen und können den Bereich erhöhen. Darüber hinaus verringert eine Zunahme der Neigung des Ziels zum Laserstrahl den Bereich.
e) Es ist strengstens untersagt, den Laserstrahl bei stark reflektierenden Zielen wie Glas- und weißer Wände innerhalb von 100 Metern zu feuern, um starke Echos zu vermeiden, was den APD -Detektor schädigen kann.
f) Es ist strengstens untersagt, das Kabel abzuziehen oder zu schließen, während es mit Energie versorgt wird.
g) Stellen Sie sicher, dass die Stromversorgung korrekt angeschlossen ist, andernfalls führt sie zu dauerhaften Beschädigungen des Geräts.
Definition von Schnittstellenhöhlen
Tabelle 1 Definition externer Schnittstellen
Tabelle 1 Definition externer Schnittstellen
| Bestellnummer | Schnittstellentyp | Pigment | Definition | Anmerkungen |
| 1 | DB9 -Schnittstellendefinition | Palme | RS422 T+ | RS422 Kommunikationsschnittstelle |
| 2 | Lila | RS422 T- | ||
| 3 | Gelb | RS422 R- | ||
| 4 | Grün | RS422 R+ | ||
| 5 | Weiß | GND | ||
| 6 | Asche | Externer Trigger- | RS422 Level | |
| 7 | Blau | Externer Trigger + | ||
| 8 | Definition der Power -Schnittstelle | Schwarz | VCC+ | DC 18V ~ 32V |
| 9 | Rot | VCC- |
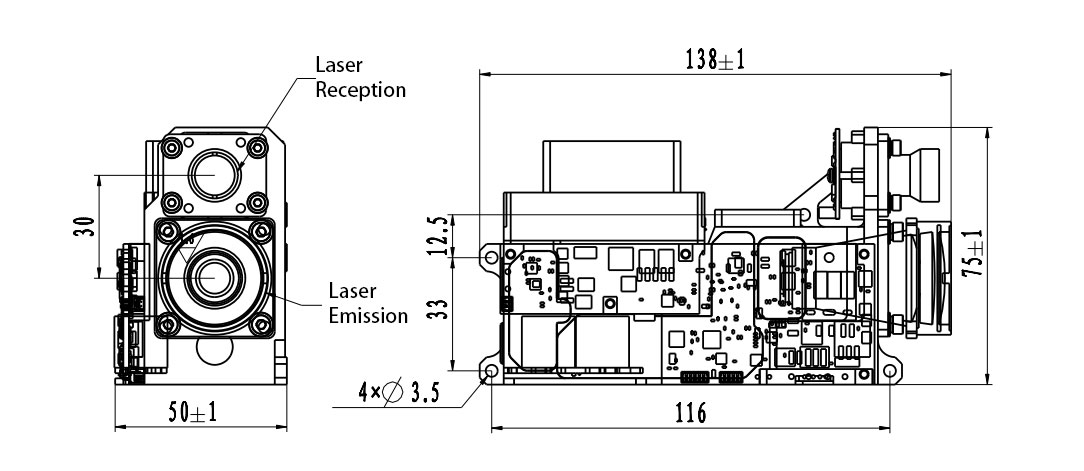
Abbildung 2 zweidimensionales Größendiagramm des Produkts
Schnittstellenkommunikationsprotokoll
1.Kommunikationsformat:
A) Die Ausfall -Baud -Rate beträgt 115200 Bps.
b) Datenformat: 8-Bit-Daten, ein Startbit, ein Stopbit, keine Paritätsprüfung, Daten bestehen aus Header-Byte, Befehlsteil, Datenlänge, Parameterteil und Überprüfungs Byte.
2.Kommunikationsmodus:
a) Der Master und das Messgerät verwenden den Master-Slave-Kommunikationsmodus, in dem der Master Steuerbefehle an das Messgerät sendet und das Messgerät die Anweisungen empfängt und ausführt. Im Bereich der Rangliste sendet das Messgerät die Daten und den Status des Messgeräts gemäß dem Laufzeitraum wieder an den oberen Computer, und der Kommunikationsformat und der Befehlsinhalt sind in der folgenden Tabelle angezeigt.
b) Nachdem der Meister den Kontrollbefehl gesendet hat, antwortet der Messgerät kontinuierlich mit drei Antwortbefehlen. Wenn der Meister den Antwortbefehl nicht innerhalb des Zeitlimits vom Messgerät erhält, wird er erneut weitergegeben.
Das Format der zu sendenden Nachricht lautet wie folgt
A) Die Ausfall -Baud -Rate beträgt 115200 Bps.
b) Datenformat: 8-Bit-Daten, ein Startbit, ein Stopbit, keine Paritätsprüfung, Daten bestehen aus Header-Byte, Befehlsteil, Datenlänge, Parameterteil und Überprüfungs Byte.
2.Kommunikationsmodus:
a) Der Master und das Messgerät verwenden den Master-Slave-Kommunikationsmodus, in dem der Master Steuerbefehle an das Messgerät sendet und das Messgerät die Anweisungen empfängt und ausführt. Im Bereich der Rangliste sendet das Messgerät die Daten und den Status des Messgeräts gemäß dem Laufzeitraum wieder an den oberen Computer, und der Kommunikationsformat und der Befehlsinhalt sind in der folgenden Tabelle angezeigt.
b) Nachdem der Meister den Kontrollbefehl gesendet hat, antwortet der Messgerät kontinuierlich mit drei Antwortbefehlen. Wenn der Meister den Antwortbefehl nicht innerhalb des Zeitlimits vom Messgerät erhält, wird er erneut weitergegeben.
Das Format der zu sendenden Nachricht lautet wie folgt
| STX0 | CMD | Len | Data1h | Data1l | Chk |
Tabelle 2 Formatbeschreibung der gesendeten Nachricht
| Bestellnummer | Name | erklären | Code | Anmerkungen |
| 1 | STX0 | Message Start Flag | 55 (h) |
|
| 2 | CMD | CW | Siehe Tabelle 3 |
|
| 3 | Len | Dl | Die Anzahl aller Bytes mit Ausnahme des Startmarks, des Befehlsworts und der Prüfsumme |
|
| 4 | Datah | Parameter | Siehe Tabelle 3 |
|
| 5 | Ankunft |
|
||
| 6 | Chk | XOR -Überprüfung | Mit Ausnahme des gültigen Byte sind alle anderen Bytes XORed |
|
Der Befehl wird wie folgt beschrieben:
Tabelle 3 Beschreibung von Befehlen und Datenwörtern, die vom Master an den Messgerät gesendet wurden
Tabelle 3 Beschreibung von Befehlen und Datenwörtern, die vom Master an den Messgerät gesendet wurden
| Bestellnummer | CW | Funktion | Daten Byte | Anmerkungen | Länge | Beispielcode |
| 1 | 0x00 | Stopp (Stop -Ranging Illumination) | D1 = 00 (H) D0 = 00 (H) |
|
Sechs Bytes | 55 00 02 00 00 57 |
| 2 | 0x01 | Single Ranging | D1 = 00 (H) D0 = 00 (H) | Das Messgerät empfängt einen einzelnen Rangleitungsanweis, führt einen Rangleitungsvorgang durch und lädt den Rangentfernungswert gleichzeitig hoch. | Sechs Bytes | 55 01 02 00 00 56 |
| 3 | 0x02 | Kontinuierlich reicht | D1 = xx (h) d0 = yy (h) | Gemäß der Set -Rang -Periode wird der Distanzwert kontinuierlich hochgeladen. Daten drückt den Laufzeitraum aus, und das Gerät ist MS | Sechs Bytes | 55 02 02 03 E8 Be (1Hz Ranging) |
| 4 | 0x03 | Selbstprüfung | D1 = 00 (H) D0 = 00 (H) |
|
Sechs Bytes | 55 03 02 00 00 54 |
| 5 | 0x04 | Blindzone Setup | D1 = xx (h) d0 = yy (h) | Daten beschreibt den Wert der Blindzone, Einheit 1M, und legt die Entfernungsanzeige innerhalb der Blindzone auf 0 fest. | Sechs Bytes | 55 04 02 01 2c 7e (300 m ist die nächste Abstand) |
| 6 | 0x06 | Kumulative Anzahl von Lichtausgabebestnungen | D1 = 00 (H) D1 = 00 (H) | Aufbewahrung ausschalten; | Sechs Bytes | 55 06 02 00 00 51 |
| 7 | 0x31 | Legen Sie den genauen Code fest | D4 D3 ~ D0 | D4: Präzise Code-Nummer, integrierte 8 Gruppen, nummeriert 1 ~ 8; D3 ~ D0 repräsentiert die Impulszeit, Einheit USRange: 45000 ~ 60000 | Neun Bytes | 55 31 05 01 00 00 C3 50 F3 (Präzise Code -Nummer: 1Cycle: 0000c350 = 50000us) |
| 8 | 0x32 | Setzen Sie variable Intervallcodes | D33 (Ref.) D32 (Anzahl der codierenden Bits) D31 ~ D30 (Zeitintervall zwischen dem letzten Bit 0) D29 ~ D28 (Zeitintervall zwischen Bit 14 und Bit 15) D27 ~ D26 (Zeitintervall zwischen Bit13 Bit14) D25 ~ D24 (Zeitintervall zwischen Bit 12 und Bit 13) D23 ~ D22 (Zeitintervall) (Zeitintervall) (Zeitintervall) (Zeitintervall) (Zeitinterval zwischen Bit 12) D21 ~ d23 ~ d22 (Zeitintervall) (Zeitintervall) (Zeitintervall) (Zeitintervall) (Zeitintervall) (Bit11 ~ D21 ~ d23 ~ d22 ~ d22 (Zeitintervall) () (Bit 13) (Bit 13) (Bit 13) (Bit 13) (Bit 13) (Bit 13) ()af2 (Bit21 ~ d23 ~ d22 ~ d22 ungen bit10 bit11)D19~D18 (time interval between bit9 bit10)D17~D16 (time interval between bit8 bit9)D15~D14 (time interval between bit7 bit8)D13~D12 (time interval between bit6 and bit7)D11~D10 (time interval between bit5 bit6)D9~D8 (time interval between bit4 bit5)D7~D6 (time interval between bit3 Bit4) D5 ~ D4 (Zeitintervall zwischen Bit2 Bit3) D3 ~ D2 (Zeitintervall zwischen Bit1 Bit2) D1 ~ D0 (Zeitintervall zwischen Bit0 und Bit1) | D33: Variable Intervall-Code-Nummer, integrierte 16 Gruppen, der Zahlenbereich beträgt 1 ~ 16; D32: Anzahl der Codierungsbits im Bereich von 3 bis 16 Time Intervall UsRange: 45000 ~ 60000 | 38 Bytes |
|
| 9 | 0x33 | Einstellung von Pseudo-Random-Codes | D4 D3 ~ D0 | D4: Pseudo-Random-Code-Codierung mit 2 integrierten Gruppen von 1 bis 2; D3: Länge des Pseudo-Random-Codes von 2 bis 16D2 D1: Anfangswert von Pseudo-random-Code, der aus dem unteren Bit gemäß der Länge von Pseudo-random coded0: standby, standby, gesetzt, 0 gesetzt wurde, gesetzt, 0 gesetzt, 0 gesetzt, 0 gesetzt, 0 gesetzt, gesetzt, gesetzt, gesetzt, gesetzt, gesetzt, gesetzt, gesetzt, gesetzt, gesetzt, wurde festgelegt, gesetzt, festgelegt, gesetzt, gesetzt, gesetzt, gesetzt, festgelegt, gesetzt, gesetzt, gesetzt, gesetzt, gesetzt, gesetzt, gesetzt, gesetzt, gesetzt, gesetzt, gesetzt, gesetzt, gesetzt, gesetzt, gesetzt | Neun Bytes | 55 33 05 01 10 AA AA 00 72 (Pseudo-Random-Code-Nummer: 1Pseudo-Zufallscode Länge: 16Initial Value: AAAA) |
| 10 | 0x41 | Stellen Sie die Abfrage für Präzisionscodes ein | D1 D0 | D1: Präzise Codenummer, der Zahlenbereich ist 1 ~ 8d0: Standby, Set 0 | Sechs Bytes | 55 41 02 01 00 13 set die Abfrage für den Präzisionscode 1 |
| 11 | 0x42 | Stellen Sie die Abfrage für variable Intervallcodes ein | D1 D0 | D1: Variable Intervall -Code -Nummer, der Zahlenbereich beträgt 1 ~ 16d0: Standby, Set 0 | Sechs Bytes | 55 42 02 01 00 14Set die Abfrage für die variable Codierung 1 |
| 12 | 0x43 | Richten Sie eine Anfrage für Pseudo-Random-Codes ein | D1 D0 | D1: Pseudo-Random-Code-Nummer, der Zahlenbereich beträgt 1 ~ 2D0: Standby, Set 0 | Sechs Bytes | 55 43 02 01 00 15Set die Abfrage mit Pseudo-Random-Codierung 1 |
| 13 | 0x44 | Kontinuierliche Bestrahlungszeiteinstellung | D1 = 00 (h) d0 = yy (h) | Die kontinuierliche Bestrahlungszeit bezieht sich auf die kontinuierliche Arbeitszeit des Messgeräts im Rahmen des kontinuierlichen Bestrahlungsmodus, Einheit s. Der automatische Stopp wird nach der Zeitüberschreitung gestoppt | Sechs Bytes | 55 44 02 00 3C 2FContinuous Arbeitszeit 60er Jahre |
| 14 | 0x45 | Kontinuierliche Bestrahlungszeitabfrage | D1 = 00 (H) D0 = 00 (H) |
|
Sechs Bytes | 55 45 02 00 00 12 |
| 15 | 0x30 | Präzise Code Bestrahlung | D3 ~ D0 | D3: Bestrahlungsmodus, 00 kontinuierliche Bestrahlung, 01 periodische BestrahlungD2: 01 Präzise Code bestrahlt | Acht Bytes | 55 30 04 00 01 01 00 61Code 1, kontinuierliche Beleuchtung des präzisen Code |
| Bestrahlung des variablen Intervallcode | D3 ~ D0 | D3: Bestrahlungsmodus, 00 kontinuierliche Bestrahlung; 01 Periodische BestrahlungD2: 02 Variabler Intervallcode bestrahlt | Acht Bytes | 55 30 04 00 02 01 00 62Code 1, variabler Intervallcode Kontinuierliche Bestrahlung | ||
| Externe synchrone Bestrahlung | D3 ~ D0 | D3: 00 Die externe Synchronisation ist nur eine kontinuierliche Illuminationd2: 03 Externe synchrone Bestrahlungd1: 00D0: 00 | Acht Bytes | 55 30 04 00 03 00 00 62 | ||
| Pseudo-Random-Code Bestrahlung | D3 ~ D0 | D3: Bestrahlungsmodus, 00 kontinuierliche Bestrahlung; 01 periodische BestrahlungD2: 04 Pseudo-Random-Code BestradiationD1: Pseudo-Random Code Numberd0: Standby 00 | Acht Bytes | 55 30 04 00 04 01 00 64Code 1, Pseudo-Random-Code Kontinuierliche Bestrahlung | ||
| 16 | 0x24 | Einstellung der periodischen Bestrahlungsparameter | D2 D1 D0 | D2: Anzahl der Arbeitszyklend1: Arbeitszeit pro Zyklus, Einheit SD0: Ruhezeit pro Zyklus in s | Sieben Bytes | 55 24 03 08 14 0a 64 (8 Zyklen, 20S -Arbeiten und 10S -Ruhe pro Zyklus) |
| 17 | 0x25 | Periodische Bestrahlungsparameterabfrage | D1 = 00 (H) D0 = 00 (H) |
|
Sechs Bytes | 55 25 02 00 00 72 |
| 18 | 0xEB | Ausrüstungsnummer Abfrage | D1 = 00 (H) D0 = 00 (H) |
|
Sechs Bytes | 55 EB 02 00 00 v. Chr. |
| 19 | 0x51 | Debug -Modus | D1 D0 | D1: 01 Debugging -Modus eingeben, 00 Beenden Debugging Moded0: Standby | Sechs Bytes | 55 41 02 01 00 17Enter Debug Mode55 41 02 00 00 16Exit Debug -Modus |
|
|
|
|
|
|
|
|
a) Hauptsteuerung erhält das Format
Das Format der empfangenen Nachricht lautet wie folgt:
Das Format der empfangenen Nachricht lautet wie folgt:
| STX0 | CMD | Len | Daten | Datum0 | Chk |
Tabelle 4 Format Beschreibung empfangener Nachrichten
| Bestellnummer | Name | erklären | Code | Anmerkungen |
| 1 | STX0 | Meldung Start Flag 1 | 55 (h) |
|
| 2 | CMD_JG | Datenbefehlswort | Siehe Tabelle 5 |
|
| 3 | Len | Dl | Die Anzahl aller Bytes mit Ausnahme der Startmarke, des Befehlsworts und der Prüfsumme |
|
| 4 | Dn | Parameter | Siehe Tabelle 5 |
|
| 5 | D0 |
|
||
| 6 | Chk | XOR -Überprüfung | Mit Ausnahme des gültigen Byte sind alle anderen Bytes XORed |
|
Hauptregelungsstatus Beschreibung:
Tabelle 5 beschreibt das vom Meter an den Master gesendete Datenwort
Tabelle 5 beschreibt das vom Meter an den Master gesendete Datenwort
| Bestellnummer | CW | Funktionsfeedback (entsprechend dem vom Messgerät empfangenen Steuerbefehl) | Daten Byte | Anmerkungen | Gesamtlänge |
| 1 | 0x00 | Stopp (Stop -Ranging Illumination) | D1 = 00 (H) D0 = xx (H) | XX: 00 Normalstop01 Stopp bei hoher Temperatur02 Stop beim Überfällen | Sechs Bytes |
| 2 | 0x03 | Selbstprüfung | D8 ~ D0C5 ~ C0B2 ~ B0 | D8-D7 (Int-Typ): -5-V-Spannungswert Feedback, Einheit 0,01V.D6-D5: Rückkopplung des Einstellungswerts der Blinde Spot, Einheit 1MD4-D3: APD Hochspannung Rückkopplung, Einheit V; D2: Zeichenstyp an, was die Hauptsteuerumgebungstemperatur (Umgebung), Einheit: Grad Celsius; AC3-C2: Stellen Sie den Rückkopplungsstrom in Einheit AC1-C0: Temperaturkontrolltemperatur Rückkopplungseinheit 0,1 ℃ B2: Anlauftemperaturregelungsstatus (8bit) Bit0: 0 Temperaturregelung zu Temperatur 1 Nicht erreichtbit1: 0 Temperaturregelung ist normal 1 Temperaturregelung 1 Temperaturregelung 1 Temperaturregelung. Der Unterschied zwischen dem Laufwerksstrom und dem festgelegten Wert ist größer als 5AB1: Laufwerkskommunikationsstatus (Messung des Kommunikationsstatus zwischen der Hauptsteuerplatine und dem Antriebsmodul) 0 ist normal und 1 ist faustbit0: Stellen Sie fest, ob der Strom erfolgreich ist. QueryB0: Kommunikationsstatus der Temperaturregelung (Kommunikationsstatus zwischen der Hauptkontrollplatine und dem Temperaturregelmodul) 0 ist normal und 1 ist Faultbit0: Ob der Start der Temperaturregelung erfolgreich ist. | 22 Bytes |
| 3 | 0x04 | Einstellung der Blindzone, Einheit m | D1 D0 | Daten beschreiben den nächsten Abstandswert, Einheit 1M; Start hoch und enden niedrig | Sechs Bytes (Drop Power Saving) |
| 4 | 0x06 | Kumulative Anzahl von Lichtausgabebestnungen | D3 ~ D0 | Daten drücken die Anzahl der Lichter aus, 4 Bytes, zuerst mit dem hohen Byte | Acht Bytes |
| 5 | 0x31 | Legen Sie den genauen Code fest | D4 D3 ~ D0 | D4: Präzise Code -Nummer, Bereich 1 ~ 8d3 ~ D0 repräsentiert den Zeitraum, Einheit UsRange: 45000 ~ 60000 | Neun Bytes |
| 6 | 0x32 | Setzen Sie variable Intervallcodes | D1 D0 | D1 Variabler Intervall -Code -Nummernbereich 1 ~ 16D0 00 wird erfolgreich eingestellt und 01 wird fehlgeschlagen | Sechs Bytes |
| 7 | 0x33 | Legen Sie einen Pseudo-Random-Code ein | D1 D0 | D1 Pseudo-Random-Code-Nummernbereich 1 ~ 2D0 00 wird erfolgreich eingestellt und 01 wird fehlgeschlagen eingestellt | Sechs Bytes |
| 8 | 0x41 | Präzise Codezyklusabfrage | D4 D3 ~ D0 | D4: Präzise Code -Nummer, Bereich 1 ~ 8d3 ~ d0 repräsentiert den Zeitraum, Einheit usRange: 45000us ~ 60000us | Neun Bytes |
| 9 | 0x42 | Abfrage mit variabler Intervallcode | D33 (ref.)D32 (number of coding bits)D31~D30 (time interval between the last bit 0)D29~D28 (time interval between bit14 bit15)D27~D26 (time interval between bit13 bit14)D25~D24 (time interval between bit 12 and bit 13)D23~D22 (time interval between bit 11 and bit 12)D21~D20 (time interval between bit 10 and bit 11)D19~D18 (time interval between bit9 and bit10)D17~D16 (time interval between bit8 bit9)D15~D14 (time interval between bit 7 and bit 8)D13~D12 (time interval between bit6 bit7)D11~D10 (time interval between bit5 bit6)D9~D8 (time interval between bit4 and bit5)D7~D6 (time interval between Bit3 Bit4) D5 ~ D4 (Zeitintervall zwischen Bit2 Bit3) D3 ~ D2 (Zeitintervall zwischen Bit1 Bit2) D1 ~ D0 (Zeitintervall zwischen Bit0 Bit1) |
|
38 Bytes |
| 10 | 0x43 | Pseudo-Random-Code-Abfrage | D4 D3 ~ D0 | D4: Pseudo-Random-Code-Codierung, Bereich 1 ~ 2D3: Länge des Pseudo-Random-Codes von 2 bis 16D2 D1: Anfangswert des Pseudo-Random-Codes, der aus dem unteren Bit entsprechend der Länge des Pseudo-Randoms codiert wird: Standby, Set 0, festgelegt 0 | Neun Bytes |
| 11 | 0x44 | Kontinuierliche Bestrahlungszeiteinstellung | D1 = 00 (h) d0 = yy (h) | Yy kontinuierliche Bestrahlungszeit, Einheiten s, Zeitlimit automatisch stoppen | Sechs Bytes |
| 12 | 0x45 | Arbeitszeitabfrage kontinuierliche Belichtung | D1 = 00 (h) d0 = yy (h) | Yy kontinuierliche Bestrahlungszeit, Einheiten s, Zeitlimit automatisch stoppen | Sechs Bytes |
| 13 | 0x24 | Einstellung der periodischen Bestrahlungsparameter | D2 D1 D0 | D2: Anzahl der Arbeitszyklend1: Arbeitszeit pro Zyklus, Einheit SD0: Ruhezeit pro Zyklus in s | Sieben Bytes |
| 14 | 0x25 | Periodische Bestrahlungsparameterabfrage | D2 D1 D0 | D2: Anzahl der Arbeitszyklend1: Arbeitszeit pro Zyklus, Einheit SD0: Ruhezeit pro Zyklus in s | Sieben Bytes |
| 15 | 0xEB | Ausrüstungsnummer Abfrage | D15 ~ D0 | D15 ~ D12: Produktmodelld11 D10: Produktnummerd9 D8: Softwareversiond7 D6: Anpassen der Q Numberd5 D4: Laufwerksnummer D2: Lasernummerd1 D0: FPGA -ID | 20 Bytes |
| 16 | 0x51 | Debug -Modus | D1 D0 | D1: 01 Debugging -Modus eingeben, 00 Beenden Debugging Moded0: Standby | Sechs Bytes |
| 17 | 0x01 | Single Ranging | D9D8 D7 D6D5 D4 D3D2 D1 D0B4 B3 B2 B1 | D9 (Bit7-Bit0) Flag-Byte: D9 ist die 7. Position, die die Hauptwelle anzeigt; 1: Es gibt eine Hauptwelle, 0: keine Hauptwelle. D9 ist die 6. Position, die Echo anzeigt; 1: Es gibt Echo, 0: Nein Echod9 Das 5. Bit zeigt den Laserstatus an. 1: Normaler Laser, 0: Laser Faustd9 ist ungültig (auf 0 gesetzt) an der 4. Position; D9 ist an der 3. Position ungültig (auf 0 gesetzt); d9 Die zweite Position zeigt den APD -Zustand an; 1: Normal, 0: Errord9 ist die erste Position, die angibt, ob es ein vorheriges Ziel gibt; 1: Es gibt ein Ziel, 0: kein Ziel (das Ziel vor dem Hauptziel ist das vorherige Ziel und das Ziel im Blindbereich) .D9 Das 0. Bit gibt an, ob es ein nachfolgendes Ziel gibt; 1: Es gibt ein Ziel, 0: Es gibt kein Ziel (das Ziel nach dem Hauptziel ist das nachfolgende Ziel) D8-D6 erster Zielabstand (Einheit 0,1 m) D5-D3-Abstand zum zweiten Ziel (Einheit 0,1 m) D2-D0 Dritter Zielabstand (Einheit 0,1 m) 3. Die Ziele von nahezu zu FARB4 und B3 geben an | 19 Bytes |
| 18 | 0x02 | Kontinuierlich reicht | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (Bit7-Bit0) Flag-Byte: D9 ist die 7. Position, die die Hauptwelle anzeigt; 1: Es gibt eine Hauptwelle, 0: keine Hauptwelle. D9 ist die 6. Position, die Echo anzeigt; 1: Es gibt Echo, 0: Nein Echod9 Das 5. Bit zeigt den Laserstatus an. 1: Normaler Laser, 0: Laser Faustd9 ist an der 4. Position ungültig (auf 0 eingestellt); D9 ist an der 3. Position ungültig (auf 0 gesetzt); D9 Die zweite Position zeigt den APD -Zustand an; 1: Normal, 0: Errord9 ist die erste Position, die angibt, ob es ein vorheriges Ziel gibt; 1: Es gibt ein Ziel, 0: Es gibt kein Ziel (das Ziel vor dem Hauptziel ist das vorherige Ziel und das Ziel im Blindbereich) .D9 Das 0. Bit gibt an, ob es ein nachfolgendes Ziel gibt; 1: Es gibt ein Ziel, 0: Es gibt kein Ziel (das Ziel nach dem Hauptziel ist ein nachfolgendes Ziel) D8-D6 Erster Zielabstand (Einheit 0,1 m) D5-D3-Abstand zum zweiten Ziel (Einheit: 0,1 m) D2-D0 Dritter Zielabstand (Einheit 0,1 m) 3. Die Ziele von nahezu zu FARB4 und B3 geben an, dass der APD -Hochdruckwertb2 der Antriebsstromwert angibt. B0 entspricht der Temperatur des Lasers | 19 Bytes |
| 19 | 0x30 | glänzend | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (Bit7-Bit0) Flag-Byte: D9 ist das 7. Bit, um die Hauptwelle anzuzeigen; 1: Es gibt eine Hauptwelle, 0: keine Hauptwelle. D9 ist die 6. Position, die Echo anzeigt; 1: Es gibt Echo, 0: Nein Echod9 Das 5. Bit zeigt den Laserstatus an. 1: Normaler Laser, 0: Laser Faustd9 ist an Position 4 ungültig (auf 0 gesetzt) D9 ist an der 3. Position ungültig (eingestellt auf 0); D9 Die zweite Position zeigt den APD -Status an; 1: Normal, 0: Errord9 ist die erste Position, die angibt, ob es ein vorheriges Ziel gibt; 1: Es gibt ein Ziel, 0: kein Ziel (das Ziel vor dem Hauptziel ist das vorherige Ziel und das Ziel im Blindbereich) .D9 Das 0. Bit gibt an, ob es ein nachfolgendes Ziel gibt; 1: Es gibt ein Ziel, 0: Es gibt kein Ziel (das Ziel nach dem Hauptziel ist das nachfolgende Ziel) D8-D6 Erster Zielabstand (Einheit 0,1 m) D5-D3-Abstand zum zweiten Ziel (Einheit: 0,1 m) D2-D0 Dritter Zielabstand (Einheit 0,1 m) 3. Die Ziele von nahezu zu FARB4 und B3 geben an, dass der APD -Hochdruckwertb2 der Antriebsstromwert angibt. B0 entspricht der Temperatur des Lasers | 19 Bytes |
| 20 | 0xec | Ein Anweisungsfehler | D1 = 00 D0 = 00 | Der Befehl camera feedback ist falsch | Sechs Bytes |
| 21 | 0xee | Effektivitätsfehler | D1 = 00 D0 = 00 | Das Feedback der Kamera ist falsch | Sechs Bytes |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| HINWEIS: ① undefined Data Byte/Bit, Standard ist 0; | |||||
Hot-Tags: 45MJ Laser Target Designator (Ltd) mit LRF, Hersteller, Lieferanten, Fabrik, China, in China hergestellt, maßgeschneidert, hohe Qualität
Verwandte Kategorie
905-nm-Laser-Entfernungsmesser-Modul
1535-nm-Laser-Entfernungsmesser-Modul
1570 nm Laser-Entfernungsmesser-Modul
1,54um Laser -Entfernungsmodul
1064nm Laserzielerheber
Anti -Drohnen -Ststem -Modul
Ranging-Lidar-Modul
Anfrage absenden
Bitte zögern Sie nicht, Ihre Anfrage im untenstehenden Formular zu stellen. Wir werden Ihnen innerhalb von 24 Stunden antworten.




 mit LRF")